- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄385396 > HSP50110JI-52 (HARRIS SEMICONDUCTOR) Digital Quadrature Tuner PDF資料下載
參數(shù)資料
| 型號: | HSP50110JI-52 |
| 廠商: | HARRIS SEMICONDUCTOR |
| 元件分類: | 通信及網(wǎng)絡(luò) |
| 英文描述: | Digital Quadrature Tuner |
| 中文描述: | SPECIALTY TELECOM CIRCUIT, PQCC84 |
| 文件頁數(shù): | 12/24頁 |
| 文件大小: | 199K |
| 代理商: | HSP50110JI-52 |
3-240
CLK by a programmable factor of 2, 4, or 8. When the
programmable clock factor is 1, IOUT9 is pulled high, and the
CLK signal should be used as the clock. The beginning of a
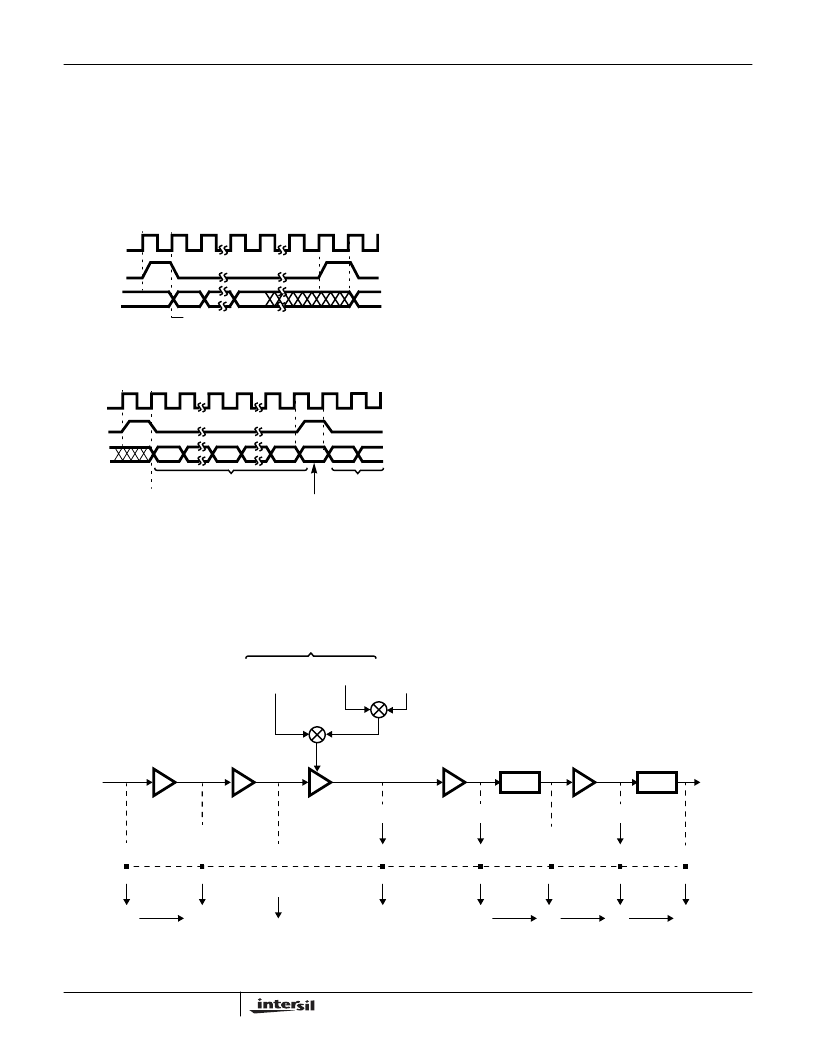
serial data word is signaled by the assertion of DATARDY one
serial clock before the first bit of the output word. In I followed
by Q Mode, DATARDY is asserted prior to each 16-bit data
word. For added flexibility, the Formatter may be configured to
output the data words in either MSB or LSB first format
.
Gain Distribution
The gain distribution in the DQT is shown in Figure 17. These
gains consist of a combination of fixed, programmable, and
adaptive gains. The fixed gains are introduced by processing
elements like the Synthesizer/Mixer and CIC Filter. The
programmable and adaptive gains are set to compensate for
the fixed gains as well as variations in input signal strength.
The bit range of the data path between processing elements
is shown in Figure 17. The quadrature inputs to the data path
are 10-bit fractional two’s complement numbers. They are
multiplied by a 10-bit quadrature sinusoid and rounded to
12-bits in the Synthesizer/Mixer. The I and Q legs are then
scaled by a fixed gain of 2
-36
to compensate for the worst
case gain of the CIC filter. Next, a gain block with an adaptive
and programmable component is used to set the output signal
level within the desired range of the 10-bit output (see Setting
DQT Gains Section). The adaptive component is produced by
the AGC and has a gain range from 1.0 to 1.9375*2
7
. The
programmable component sets the gain range of the CIC
shifter which may range from 2
0
to 2
63
. Care must be taken
when setting the AGC gain limits and the CIC Shifter gain
since the sum of these gains could shift the CIC Scaler output
beyond the bit range (-2
8
to 2
-46
) of the CIC Filter input. The
CIC Filter introduces a gain factor given by R
N
where R is the
decimation rate of the filter and N is the CIC order. The CIC
order is either 1 (integrate and dump filter) or 3. Depending on
configuration, the CIC Filter introduces a gain factor from 2
0
to
2
36
. The output of the CIC Filter is then rounded and limited to
an 11-bit window between bit positions 2
1
to 2
-9
. Values
outside this range saturate to these 11 bits. The
Compensation Filter introduces a final gain factor of 1.0, 0.65,
LSB
MSB
LSB
IOUT9
IOUT0/
QOUT0
DATARDY
NOTE: Assumes data is being output LSB first.
FIGURE 15. SERIAL TIMING (SIMULTANEOUS I/Q MODE)
DATARDY LEADS 1st BIT
LSB
MSB
0
IOUT9
IOUT0
DATARDY
1
I DATA WORD
MSB
Q DATA
WORD
I OUTPUT IDENTIFIED
BY 1 IN LSB OF DATA WORD
NOTE: Assumes data is being output MSB first.
DATARDY may be programmed active high or low.
FIGURE 16. SERIAL TIMING (I FOLLOWED BY Q MODE)
DATARDY
LEADS 1st BIT
FIGURE 17. GAIN DISTRIBUTION AND INTERMEDIATE BIT WEIGHTINGS
SYNTHESIZER/
MIXER
G = 0.9990
-2
0
2
-9
2
-1
2
0
2
-10
RND
2
-1
-2
1
CIC
G = 2
-36
MANTISSA
1.0 - 1.9375
(0.0625 STEPS)
EXPONENT
2
0
-2
7
SCALER
CIC BARREL
SHIFTER
2
-2
G = 1.0 - 1.9375*2
70
CIC
FILTER
G = 2
0
- 2
36
COMPENSATION
FILTER
GAIN
G = 1.0, 0.65, 0.77
(BYPASS, x/sin(x), (x/sin(x))
3
2
-46
-2
-35
2
0
2
-46
RND
2
-1
-2
8
2
0
2
-9
RND
2
-1
-2
8
2
0
2
-9
2
-1
-2
1
2
0
2
-9
RND
2
-1
-2
3
-2
0
2
-9
2
-1
BINARY POINT
AGC GAIN
INPUT
OUTPUT
BIT RANGE OF DATA PATH
LIMIT
LIMIT
(R
N
)
G
dB
= 0dB
G
dB
= -216.74dB
G
dB
= G
AGC
+
G
SHIFTER
G
dB
= 20log[f
S
/f
D
]
N
= 20log[R]
N
N = 1, 3
G
dB
= 0dB
G
dB
= 0dB
0dB BYPASS
-3.74dB
-2.27dB
G
dB
=
G = -6.02dB
HSP50110
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| HSP50110JC-52 | CONN HEADER HM 2MM 100POS |
| HSP50110 | Digital Quadrature Tuner(數(shù)字調(diào)諧器) |
| HSP50210 | Digital Costas Loop(數(shù)字Costas鎖相環(huán)) |
| HSP50214VC | Programmable Downconverter |
| HSP50214VI | Programmable Downconverter |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| HSP50110JI-52Z | 制造商:Intersil Corporation 功能描述:PB-FREE W/ANNEAL DIGITAL QUADRATURE TUNER 84 PLCC,52MHZ,INDU - Rail/Tube |
| HSP50210 | 制造商:INTERSIL 制造商全稱:Intersil Corporation 功能描述:Digital Costas Loop |
| HSP50210JC-52 | 功能描述:上下轉(zhuǎn)換器 COSTAS DEMODULATOR,84 PLCC,52MHZ,COMM RoHS:否 制造商:Texas Instruments 產(chǎn)品:Down Converters 射頻:52 MHz to 78 MHz 中頻:300 MHz LO頻率: 功率增益: P1dB: 工作電源電壓:1.8 V, 3.3 V 工作電源電流:120 mA 最大功率耗散:1 W 最大工作溫度:+ 85 C 安裝風格:SMD/SMT 封裝 / 箱體:PQFP-128 |
| HSP50210JC-52Z | 功能描述:上下轉(zhuǎn)換器 COSTAS DEMODULATOR 84 PLCC 52MHZ COM RoHS:否 制造商:Texas Instruments 產(chǎn)品:Down Converters 射頻:52 MHz to 78 MHz 中頻:300 MHz LO頻率: 功率增益: P1dB: 工作電源電壓:1.8 V, 3.3 V 工作電源電流:120 mA 最大功率耗散:1 W 最大工作溫度:+ 85 C 安裝風格:SMD/SMT 封裝 / 箱體:PQFP-128 |
| HSP50210JI-52 | 功能描述:上下轉(zhuǎn)換器 COSTAS DEMODULATOR,84 PLCC,52MHZ,IND RoHS:否 制造商:Texas Instruments 產(chǎn)品:Down Converters 射頻:52 MHz to 78 MHz 中頻:300 MHz LO頻率: 功率增益: P1dB: 工作電源電壓:1.8 V, 3.3 V 工作電源電流:120 mA 最大功率耗散:1 W 最大工作溫度:+ 85 C 安裝風格:SMD/SMT 封裝 / 箱體:PQFP-128 |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。