- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄1954 > MM912H634CM1AER2 (Freescale Semiconductor)IC 64KS12 LIN2XLS/HS ISENSE PDF資料下載
參數(shù)資料
| 型號: | MM912H634CM1AER2 |
| 廠商: | Freescale Semiconductor |
| 文件頁數(shù): | 106/349頁 |
| 文件大?。?/td> | 0K |
| 描述: | IC 64KS12 LIN2XLS/HS ISENSE |
| 標(biāo)準(zhǔn)包裝: | 2,000 |
| 應(yīng)用: | 自動 |
| 核心處理器: | HCS12 |
| 程序存儲器類型: | 閃存(64 kB) |
| 控制器系列: | HCS12 |
| RAM 容量: | 6K x 8 |
| 接口: | LIN |
| 電源電壓: | 5.5 V ~ 27 V |
| 工作溫度: | -40°C ~ 125°C |
| 安裝類型: | 表面貼裝 |
| 封裝/外殼: | 48-LQFP 裸露焊盤 |
| 包裝: | 帶卷 (TR) |
| 供應(yīng)商設(shè)備封裝: | 48-LQFP 裸露焊盤(7x7) |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁當(dāng)前第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁第158頁第159頁第160頁第161頁第162頁第163頁第164頁第165頁第166頁第167頁第168頁第169頁第170頁第171頁第172頁第173頁第174頁第175頁第176頁第177頁第178頁第179頁第180頁第181頁第182頁第183頁第184頁第185頁第186頁第187頁第188頁第189頁第190頁第191頁第192頁第193頁第194頁第195頁第196頁第197頁第198頁第199頁第200頁第201頁第202頁第203頁第204頁第205頁第206頁第207頁第208頁第209頁第210頁第211頁第212頁第213頁第214頁第215頁第216頁第217頁第218頁第219頁第220頁第221頁第222頁第223頁第224頁第225頁第226頁第227頁第228頁第229頁第230頁第231頁第232頁第233頁第234頁第235頁第236頁第237頁第238頁第239頁第240頁第241頁第242頁第243頁第244頁第245頁第246頁第247頁第248頁第249頁第250頁第251頁第252頁第253頁第254頁第255頁第256頁第257頁第258頁第259頁第260頁第261頁第262頁第263頁第264頁第265頁第266頁第267頁第268頁第269頁第270頁第271頁第272頁第273頁第274頁第275頁第276頁第277頁第278頁第279頁第280頁第281頁第282頁第283頁第284頁第285頁第286頁第287頁第288頁第289頁第290頁第291頁第292頁第293頁第294頁第295頁第296頁第297頁第298頁第299頁第300頁第301頁第302頁第303頁第304頁第305頁第306頁第307頁第308頁第309頁第310頁第311頁第312頁第313頁第314頁第315頁第316頁第317頁第318頁第319頁第320頁第321頁第322頁第323頁第324頁第325頁第326頁第327頁第328頁第329頁第330頁第331頁第332頁第333頁第334頁第335頁第336頁第337頁第338頁第339頁第340頁第341頁第342頁第343頁第344頁第345頁第346頁第347頁第348頁第349頁
MM912_634 Advance Information, Rev. 10.0
Freescale Semiconductor
194
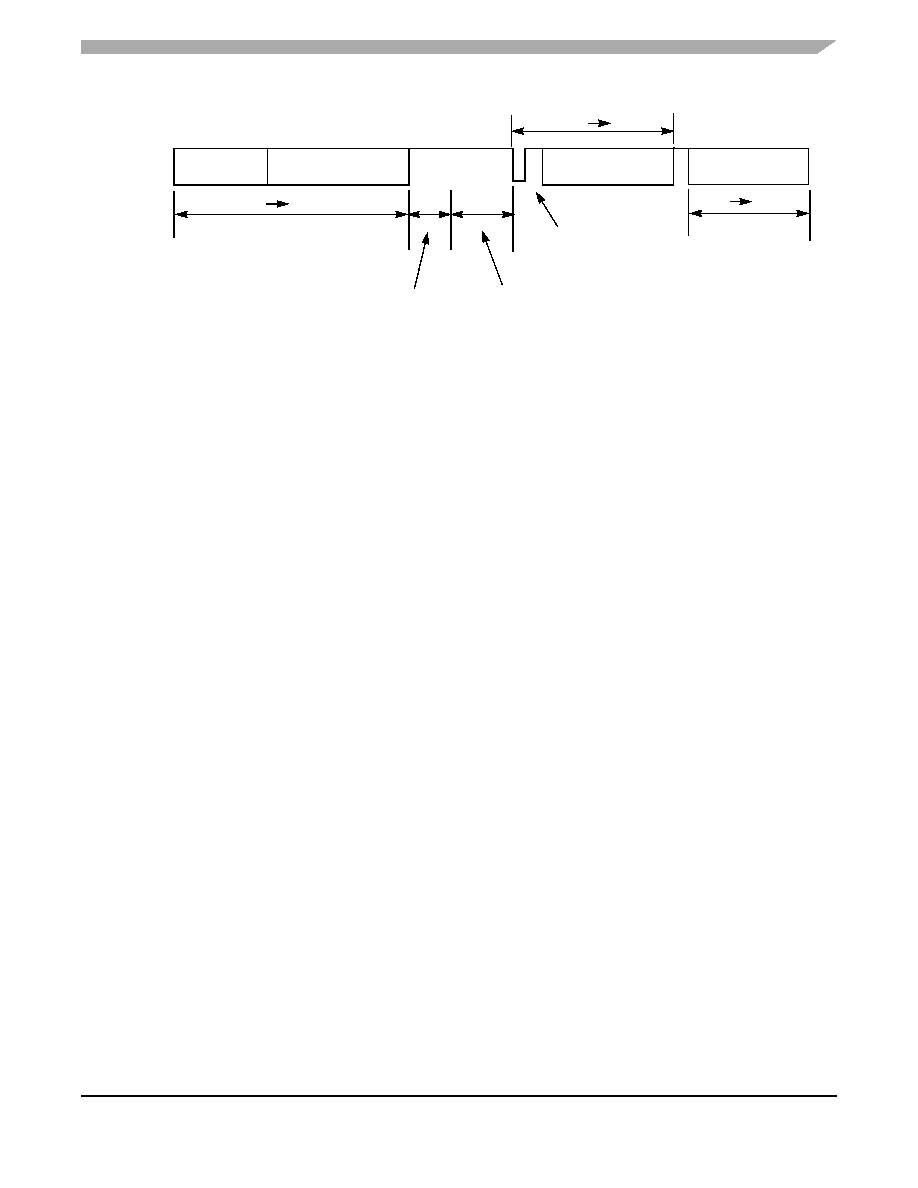
Figure 59. Handshake Protocol at the Command Level
Differently from the normal bit transfer (where the host initiates the transmission), the serial interface ACK handshake pulse is
initiated by the target MCU by issuing a negative edge on the BKGD pin. The hardware handshake protocol in Figure 58 specifies
the timing when the BKGD pin is being driven, so the host should follow this timing constraint in order to avoid the risk of an
electrical conflict on the BKGD pin.
NOTE
The only place the BKGD pin can have an electrical conflict is when one side is driving low
and the other side is issuing a speedup pulse (high). Other “highs” are pulled rather than
driven. However, at low rates the time of the speedup pulse can become lengthy and so the
potential conflict time becomes longer as well.
The ACK handshake protocol does not support nested ACK pulses. If a BDM command is not acknowledge by an ACK pulse,
the host needs to abort the pending command first in order to be able to issue a new BDM command. When the CPU enters stop
while the host issues a hardware command (e.g., WRITE_BYTE), the target discards the incoming command due to the stop
being detected. Therefore, the command is not acknowledged by the target, which means that the ACK pulse will not be issued
in this case. After a certain time the host (not aware of stop) should decide to abort any possible pending ACK pulse in order to
be sure a new command can be issued. Therefore, the protocol provides a mechanism in which a command, and its
corresponding ACK, can be aborted.
NOTE
The ACK pulse does not provide a timeout. This means for the GO_UNTIL(182) command
that it can not be distinguished if a stop has been executed (command discarded and ACK
not issued) or if the “UNTIL” condition (BDM active) is just not reached yet. Hence in any
case where the ACK pulse of a command is not issued the possible pending command
should be aborted before issuing a new command. See the handshake abort procedure
5.31.4.8
Hardware Handshake Abort Procedure
The abort procedure is based on the SYNC command. In order to abort a command, which had not issued the corresponding
ACK pulse, the host controller should generate a low pulse in the BKGD pin by driving it low for at least 128 serial clock cycles
and then driving it high for one serial clock cycle, providing a speedup pulse.By detecting this long low pulse in the BKGD pin,
the target executes the SYNC protocol, see Section 5.31.4.9, “SYNC — Request Timed Reference Pulse", and assumes that the
pending command and therefore the related ACK pulse, are being aborted. Therefore, after the SYNC protocol has been
completed the host is free to issue new BDM commands. For BDM firmware READ or WRITE commands it can not be
guaranteed that the pending command is aborted when issuing a SYNC before the corresponding ACK pulse. There is a short
latency time from the time the READ or WRITE access begins until it is finished and the corresponding ACK pulse is issued. The
latency time depends on the firmware READ or WRITE command that is issued and on the selected bus clock rate. When the
SYNC command starts during this latency time the READ or WRITE command will not be aborted, but the corresponding ACK
pulse will be aborted. A pending GO, TRACE1 or GO_UNTIL(182) command can not be aborted. Only the corresponding ACK
pulse can be aborted by the SYNC command.
Although it is not recommended, the host could abort a pending BDM command by issuing a low pulse in the BKGD pin shorter
than 128 serial clock cycles, which will not be interpreted as the SYNC command. The ACK is actually aborted when a negative
edge is perceived by the target in the BKGD pin. The short abort pulse should have at least 4 clock cycles keeping the BKGD
READ_BYTE
BDM Issues the
BKGD Pin
Byte Address
BDM Executes the
READ_BYTE Command
Host
Target
Host
Target
BDM Decodes
the Command
ACK Pulse (out of scale)
Host
Target
(2) Bytes are
Retrieved
New BDM
Command
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MMC2001HCAB33B | IC MCU 32BIT 33MHZ 144-LQFP |
| MMC2107CFCPU33 | IC MCU 32BIT 33MHZ 100-LQFP |
| MMC2114CFCAG33 | IC MCU 32BIT 33MHZ 144-LQFP |
| MPC184VFB | IC SECURITY PROCESSOR 252-PBGA |
| MPC5125YVN400 | IC MCU 32BIT E300 324TEPBGA |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MM912H634CV1AE | 功能描述:LIN 收發(fā)器 64KS12 LIN2xLS/HS Isense RoHS:否 制造商:NXP Semiconductors 工作電源電壓: 電源電流: 最大工作溫度: 封裝 / 箱體:SO-8 |
| MM912H634CV1AER2 | 功能描述:LIN 收發(fā)器 64KS12 LIN2xLS/HS Isense RoHS:否 制造商:NXP Semiconductors 工作電源電壓: 電源電流: 最大工作溫度: 封裝 / 箱體:SO-8 |
| MM912H634DM1AE | 功能描述:16位微控制器 - MCU 64KS12 LIN2XLS/HS ISENSE RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數(shù)據(jù)總線寬度:16 bit 最大時(shí)鐘頻率:24 MHz 程序存儲器大小:8 KB 數(shù)據(jù) RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風(fēng)格:SMD/SMT |
| MM912H634DM1AER2 | 功能描述:16位微控制器 - MCU 64KS12 LIN2XLS/HS ISENSE RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數(shù)據(jù)總線寬度:16 bit 最大時(shí)鐘頻率:24 MHz 程序存儲器大小:8 KB 數(shù)據(jù) RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風(fēng)格:SMD/SMT |
| MM912H634DV1AE | 功能描述:16位微控制器 - MCU 64KS12 LIN2XLS/HS ISENSE RoHS:否 制造商:Texas Instruments 核心:RISC 處理器系列:MSP430FR572x 數(shù)據(jù)總線寬度:16 bit 最大時(shí)鐘頻率:24 MHz 程序存儲器大小:8 KB 數(shù)據(jù) RAM 大小:1 KB 片上 ADC:Yes 工作電源電壓:2 V to 3.6 V 工作溫度范圍:- 40 C to + 85 C 封裝 / 箱體:VQFN-40 安裝風(fēng)格:SMD/SMT |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。