- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄382368 > P82C150AFT (NXP SEMICONDUCTORS) CAN Serial Linked I/O device SLIO with digital and analog port functions PDF資料下載
參數(shù)資料
| 型號: | P82C150AFT |
| 廠商: | NXP SEMICONDUCTORS |
| 元件分類: | 微控制器/微處理器 |
| 英文描述: | CAN Serial Linked I/O device SLIO with digital and analog port functions |
| 中文描述: | 1 CHANNEL(S), 125K bps, LOCAL AREA NETWORK CONTROLLER, PDSO28 |
| 封裝: | 7.50 MM, PLASTIC, SO-28 |
| 文件頁數(shù): | 14/36頁 |
| 文件大小: | 209K |
| 代理商: | P82C150AFT |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁當(dāng)前第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁
1996 Jun 19
14
Philips Semiconductors
Preliminary specification
CAN Serial Linked I/O device (SLIO) with
digital and analog port functions
P82C150
7.3
CAN functions
The P82C150 meets the CAN protocol specification
version 2.0 A and B (passive) with restricted bit timing
because of the on-chip RC-oscillator and the automatic bit
rate detection.
In a system with P82C150 nodes there must be at least
one conventional crystal-driven CAN controller (host node)
which is compatible to the CAN specification V1.2 or later
to control P82C150 nodes. Host nodes compatible to CAN
specification V1.1 can also be used provided that the
P82C150 nodes are powered by a high-accuracy power
supply or they are in external oscillator mode (refer to
Section 11.3).
Each time a P82C150 node receives a Data Frame, it
initiates the transmission of a Data Frame containing four
bits status information, the register address (previously
received) and the current contents of the addressed
register (exception: see Section 7.3.3.1). This enables the
host node to verify that the addressed register has
correctly been written in case of writeable registers, and to
read the contents in case of readable registers.
7.3.1
CAN I
DENTIFIER
Data and Remote Frames to be processed by the
P82C150 are of Standard Format with 11 Identifier bits
ID.10 to ID.0. Frames with extended Identifier (CAN
specification version 2.0 B) are ignored.
The way of identifier programming is based on two facts:
Each P82C150 operates with only two Identifiers
distinguished by the LSB (see Tables 5, 6 and 7).
The identifier with the higher priority is used for Data
Frame reception. An extra Identifier is used for
calibration purposes.
There can be maximum sixteen P82C150 circuits in one
network.
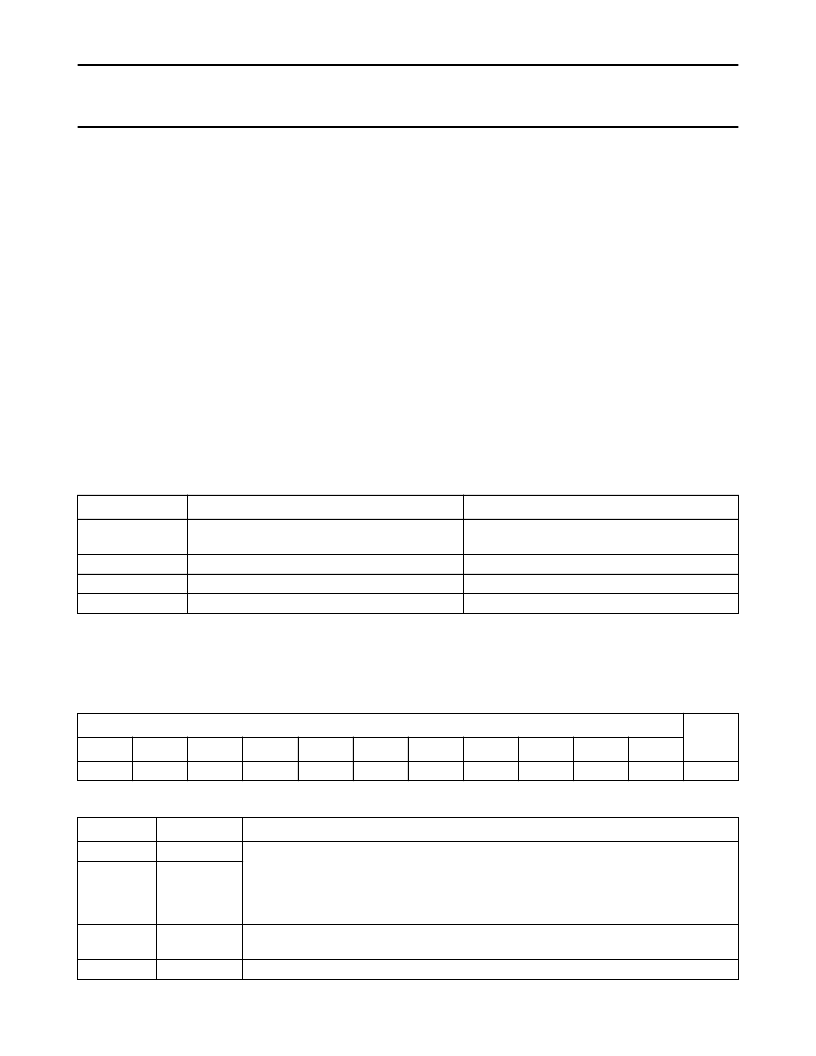
Table 5
Message types and format
Note
1.
DLC = Data Length Code; DIR = LSB of Identifier (see Section 7.3.1).
Table 6
1 = recessive; 0 = dominant
Standard Format Identifier bits ID.10 to ID.0
Table 7
Description of the Standard Format Identifier bits
FRAME
TRANSMISSION BY 82C150
RECEPTION AT 82C150
Data Frame
yes (DLC = 3; DIR = 1)
yes (DLC = 3; DIR = 0; calibration message
with DLC = 2 to 8 allowed, see Section 7.3.10)
yes (DLC = 3; DIR = 1)
yes
yes
Remote Frame
Error Frame
Overload Frame
no
yes
yes (only as a response)
IDENTIFIER
ID.10
ID.9
ID.8
ID.7
ID.6
ID.5
ID.4
ID.3
ID.2
ID.1
ID.0
0
1
P3
1
0
P2
P1
P0
1
0
DIR
RTR
BIT
SYMBOL
DESCRIPTION
ID.8
P3
P2 to P0
Programmable identifier bits read from Port pins P3 to P0 during reset. The input levels
on P3 to P0, for example set by resistors to V
SS
or to V
DD
, are latched in the Identifier
latch with the falling edge of the RST input signal. They represent the variable part of
the Identifier, while the remaining bits are fixed (mask-programmed), P3 to P0 can be
used as I/O ports after reset.
DIR = 1 for transmission of Data Frames to the host. It must be set to a logic 1 in
Remote Frames and to a logic 0 in Data Frames received from the host.
Remote Transmission Request bit.
ID.5 to ID.3
ID.0
DIR
RTR
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| P82C150AHT | 22 PIN R/A MALE PRESSFIT ATCA ZONE 1 CON |
| P82C605 | System Controller |
| P82C606 | System Controller |
| P82C607 | Peripheral IC |
| P82C611 | Micro Channel Bus Interface/Controller |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| P82C150AHT | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:CAN Serial Linked I/O device SLIO with digital and analog port functions |
| P82C201-10 | 制造商:CHIPS 功能描述: 制造商:CHIP 功能描述:SYSTEM CONTROLLER, 84 Pin, PLCC 制造商:CHIPS 功能描述:SYSTEM CONTROLLER, 84 Pin, PLCC |
| P82C201-10 TS89 | 制造商:TOS 功能描述:82C201-10 |
| P82C201-10-7014-0093 | 制造商:CHIPS 功能描述: |
| P82C20110TS89 | 制造商:TOS 功能描述:82C201-10 |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。