- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄299576 > OR3T55-4PS208I FPGA, 324 CLBS, 40000 GATES, 80 MHz, PQFP208 PDF資料下載
參數(shù)資料
| 型號(hào): | OR3T55-4PS208I |
| 元件分類: | FPGA |
| 英文描述: | FPGA, 324 CLBS, 40000 GATES, 80 MHz, PQFP208 |
| 封裝: | SQFP-208 |
| 文件頁(yè)數(shù): | 201/210頁(yè) |
| 文件大小: | 2138K |
| 代理商: | OR3T55-4PS208I |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)第38頁(yè)第39頁(yè)第40頁(yè)第41頁(yè)第42頁(yè)第43頁(yè)第44頁(yè)第45頁(yè)第46頁(yè)第47頁(yè)第48頁(yè)第49頁(yè)第50頁(yè)第51頁(yè)第52頁(yè)第53頁(yè)第54頁(yè)第55頁(yè)第56頁(yè)第57頁(yè)第58頁(yè)第59頁(yè)第60頁(yè)第61頁(yè)第62頁(yè)第63頁(yè)第64頁(yè)第65頁(yè)第66頁(yè)第67頁(yè)第68頁(yè)第69頁(yè)第70頁(yè)第71頁(yè)第72頁(yè)第73頁(yè)第74頁(yè)第75頁(yè)第76頁(yè)第77頁(yè)第78頁(yè)第79頁(yè)第80頁(yè)第81頁(yè)第82頁(yè)第83頁(yè)第84頁(yè)第85頁(yè)第86頁(yè)第87頁(yè)第88頁(yè)第89頁(yè)第90頁(yè)第91頁(yè)第92頁(yè)第93頁(yè)第94頁(yè)第95頁(yè)第96頁(yè)第97頁(yè)第98頁(yè)第99頁(yè)第100頁(yè)第101頁(yè)第102頁(yè)第103頁(yè)第104頁(yè)第105頁(yè)第106頁(yè)第107頁(yè)第108頁(yè)第109頁(yè)第110頁(yè)第111頁(yè)第112頁(yè)第113頁(yè)第114頁(yè)第115頁(yè)第116頁(yè)第117頁(yè)第118頁(yè)第119頁(yè)第120頁(yè)第121頁(yè)第122頁(yè)第123頁(yè)第124頁(yè)第125頁(yè)第126頁(yè)第127頁(yè)第128頁(yè)第129頁(yè)第130頁(yè)第131頁(yè)第132頁(yè)第133頁(yè)第134頁(yè)第135頁(yè)第136頁(yè)第137頁(yè)第138頁(yè)第139頁(yè)第140頁(yè)第141頁(yè)第142頁(yè)第143頁(yè)第144頁(yè)第145頁(yè)第146頁(yè)第147頁(yè)第148頁(yè)第149頁(yè)第150頁(yè)第151頁(yè)第152頁(yè)第153頁(yè)第154頁(yè)第155頁(yè)第156頁(yè)第157頁(yè)第158頁(yè)第159頁(yè)第160頁(yè)第161頁(yè)第162頁(yè)第163頁(yè)第164頁(yè)第165頁(yè)第166頁(yè)第167頁(yè)第168頁(yè)第169頁(yè)第170頁(yè)第171頁(yè)第172頁(yè)第173頁(yè)第174頁(yè)第175頁(yè)第176頁(yè)第177頁(yè)第178頁(yè)第179頁(yè)第180頁(yè)第181頁(yè)第182頁(yè)第183頁(yè)第184頁(yè)第185頁(yè)第186頁(yè)第187頁(yè)第188頁(yè)第189頁(yè)第190頁(yè)第191頁(yè)第192頁(yè)第193頁(yè)第194頁(yè)第195頁(yè)第196頁(yè)第197頁(yè)第198頁(yè)第199頁(yè)第200頁(yè)當(dāng)前第201頁(yè)第202頁(yè)第203頁(yè)第204頁(yè)第205頁(yè)第206頁(yè)第207頁(yè)第208頁(yè)第209頁(yè)第210頁(yè)
90
Lucent Technologies Inc.
Preliminary Data Sheet, Rev. 1
ORCA Series 3 FPGAs
September 1998
FPGA Configuration Modes (continued)
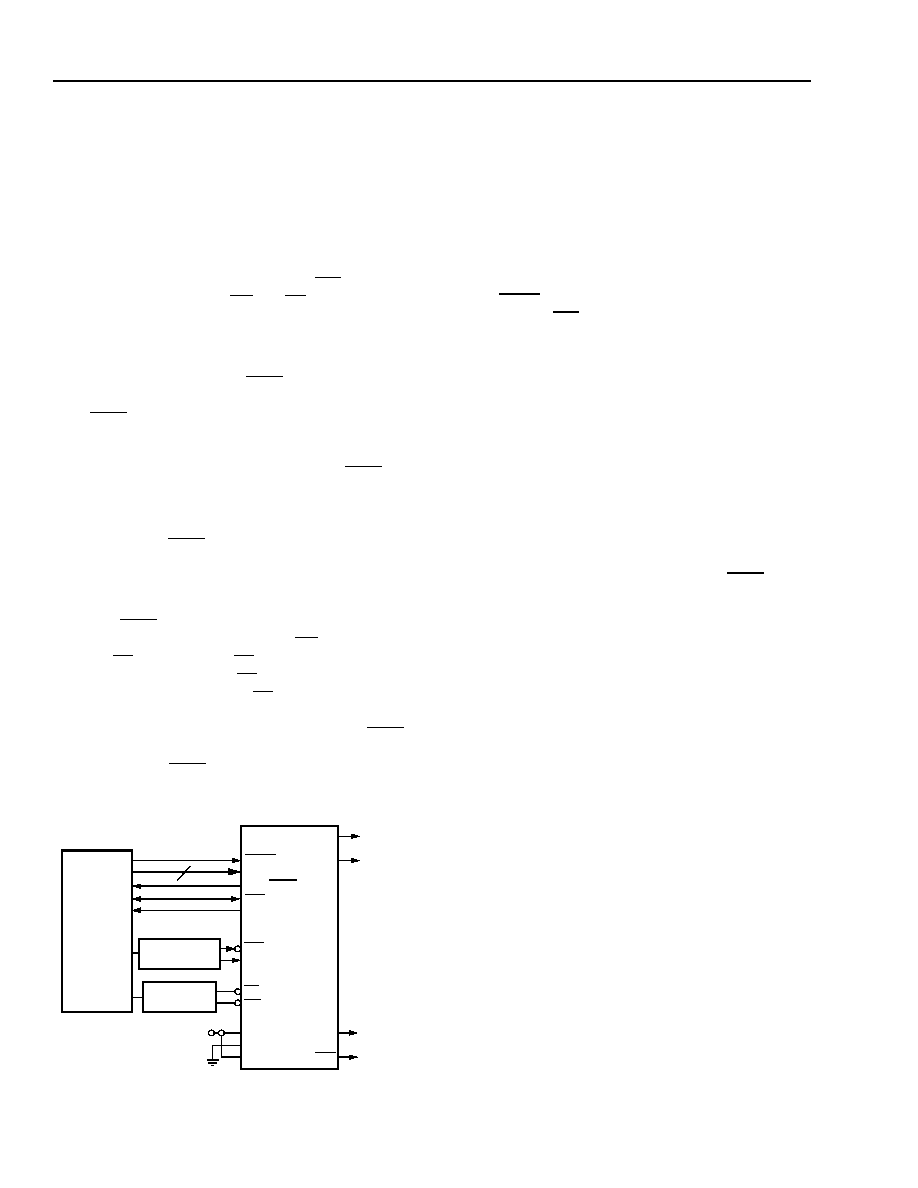
Asynchronous Peripheral Mode
Figure 56 shows the connections needed for the asyn-
chronous peripheral mode. In this mode, the FPGA
system interface is similar to that of a microprocessor-
peripheral interface. The microprocessor generates the
control signals to write an 8-bit byte into the FPGA. The
FPGA control inputs include active-low CS0 and active-
high CS1 chip selects and WR and RD inputs. The chip
selects can be cycled or maintained at a static level
during the configuration cycle. Each byte of data is writ-
ten into the FPGA’s D[7:0] input pins.
The FPGA provides an RDY/BUSY status output to
indicate that another byte can be loaded. A low on
RDY/BUSY indicates that the double-buffered hold/shift
registers are not ready to receive data, and this pin
must be monitored to go high before another byte of
data can be written. The shortest time RDY/BUSY is
low occurs when a byte is loaded into the hold register
and the shift register is empty, in which case the byte is
immediately transferred to the shift register. The long-
est time for RDY/BUSY to remain low occurs when a
byte is loaded into the holding register and the shift
register has just started shifting configuration data into
configuration RAM.
The RDY/BUSY status is also available on the D7 pin
applying RD low, where the RD input provides an output
enable for the D7 pin when RD is low. The D[6:0] pins
are not enabled to drive when RD is low and, therefore,
only act as input pins in asynchronous peripheral
mode. Optionally, the user can ignore the RDY/BUSY
status and simply wait until the maximum time it would
take for the RDY/BUSY line to go high, indicating the
FPGA is ready for more data, before writing the next
data byte.
Figure 56. Asynchronous Peripheral Configuration
Microprocessor Interface (MPI) Mode
The built-in MPI in Series 3 FPGAs is designed for use
the glueless interface for FPGA configuration and read-
back from the
PowerPC and i960 processors, respec-
tively. When enabled by the mode pins, the MPI
handles all configuration/readback control and hand-
shaking with the host processor. For single FPGA con-
figuration, the host sets the configuration control
register PRGM bit to zero then back to a one and, after
reading that the INIT signal is high in the MPI status
register, transfers data 8 bits at a time to the FPGA’s
D[7:0] input pins.
If configuring multiple FPGAs through daisy-chain
operation is desired, the MP_DAISY bit must be set in
the configuration control register of the MPI. Because
of the latency involved in a daisy-chain configuration,
the MP_HOLD_BUS bit may be set to zero rather than
one for daisy-chain operation. This allows the MPI to
acknowledge the data transfer before the configuration
information has been serialized and transferred on the
FPGA daisy-chain. The early acknowledgment frees
the host processor to perform other system tasks. Con-
figuring with the MP_HOLD_BUS bit at zero requires
that the host microprocessor poll the RDY/BUSY bit of
the MPI status register and/or use the MPI interrupt
capability to confirm the readiness of the MPI for more
configuration data.
There are two options for using the host interrupt
request in configuration mode. The configuration con-
trol register offers control bits to enable the interrupt on
either a bit stream error or to notify the host processor
when the FPGA is ready for more configuration data.
The MPI status register may be used in conjunction
with, or in place of, the interrupt request options. The
status register contains a 2-bit field to indicate the bit
stream error status. As previously mentioned, there is
also a bit to indicate the MPI’s readiness to receive
another byte of configuration data. A flow chart of the
MPI
configuration process is shown in Figure 59. The
MPI
status and configuration register bit maps can be
found in the Special Function Blocks section and MPI
configuration timing information is available in the Tim-
ing Characteristics section of this data sheet.
MICRO-
PROCESSOR
D[7:0]
CS1
M2
M1
M0
HDC
ORCA
SERIES
FPGA
8
LDC
VDD
DONE
CS0
DOUT
CCLK
TO DAISY-
CHAINED
DEVICES
BUS
CONTROLLER
ADDRESS
DECODE LOGIC
RD
WR
RDY/BUSY
INIT
PRGM
5-4484(F)
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| OR3T55-4PS208 | FPGA, 324 CLBS, 40000 GATES, 80 MHz, PQFP208 |
| OR3T80-4PS208I | FPGA, 484 CLBS, 58000 GATES, 80 MHz, PQFP208 |
| OR3T80-4PS208 | FPGA, 484 CLBS, 58000 GATES, 80 MHz, PQFP208 |
| OR3T125-4PS240I | FPGA, 784 CLBS, 92000 GATES, 80 MHz, PQFP240 |
| OR3T125-4PS240 | FPGA, 784 CLBS, 92000 GATES, 80 MHz, PQFP240 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| OR3T55-4PS240I | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Field Programmable Gate Array (FPGA) |
| OR3T55-5BA256 | 制造商:AGERE 制造商全稱:AGERE 功能描述:3C and 3T Field-Programmable Gate Arrays |
| OR3T55-5BA256I | 制造商:AGERE 制造商全稱:AGERE 功能描述:3C and 3T Field-Programmable Gate Arrays |
| OR3T55-5BA352 | 制造商:AGERE 制造商全稱:AGERE 功能描述:3C and 3T Field-Programmable Gate Arrays |
| OR3T55-5BA352I | 制造商:AGERE 制造商全稱:AGERE 功能描述:3C and 3T Field-Programmable Gate Arrays |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。