- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄359155 > MCZ33977EG (飛思卡爾半導(dǎo)體(中國(guó))有限公司) Single Gauge Driver PDF資料下載
參數(shù)資料
| 型號(hào): | MCZ33977EG |
| 廠商: | 飛思卡爾半導(dǎo)體(中國(guó))有限公司 |
| 英文描述: | Single Gauge Driver |
| 中文描述: | 單表驅(qū)動(dòng) |
| 文件頁(yè)數(shù): | 18/37頁(yè) |
| 文件大?。?/td> | 402K |
| 代理商: | MCZ33977EG |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)第17頁(yè)當(dāng)前第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)第37頁(yè)
Analog Integrated Circuit Device Data
Freescale Semiconductor
18
33977
FUNCTIONAL DEVICE OPERATION
OPERATIONAL MODES
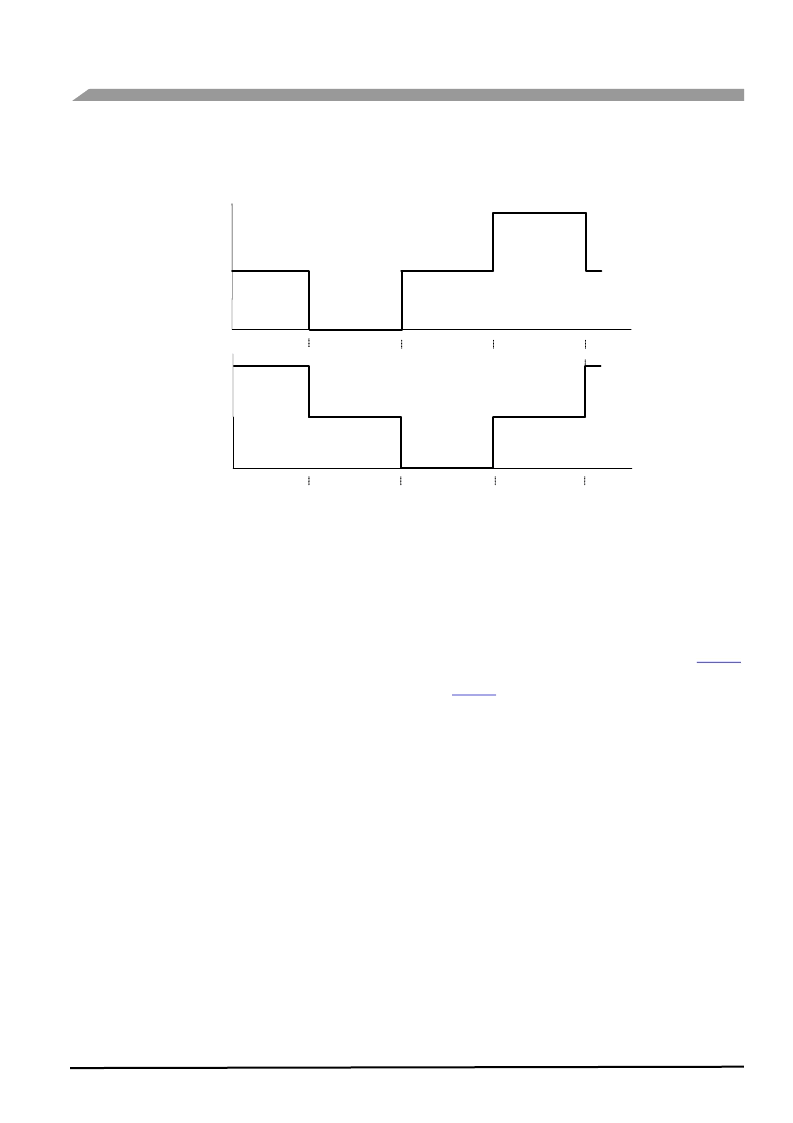
Figure 10. Full Steps (Counterclockwise)
The IC automatically prepares the non-driven coil at each
step, waits for a predetermined blanking time, and then
processes the signal for the duration of the full step. When
the pointer reaches the stop and not longer moves, the
dissipating flux is detected. The processed results are placed
in the RTZ accumulator, and then compared to a decision
threshold. If the signal exceeds the decision threshold, the
pointer is assumed to be moving. If the threshold value is not
exceeded, the drive sequence is stopped if RTZR bit RZ4 is
Logic [0]. If bit RZ4 is Logic [1], the RTZ movement will
continue indefinitely until the RTZR bit RZ1 is used to stop the
RTZ event.
A pointer [
that is
PV] not on a full step location, or [
that
PV] is in magnetic alignment prior to the RTZ event may
cause a false RTZ detection. More specifically, an RTZ event
beginning from a non-full step position may result in an
abbreviated flux value potentially interpreted as a stalled
pointer. Advancing the pointed by at least 12 microsteps
clockwise (if PE7 = 0) to the nearest full step position (e.g., 0,
6, 12, 18, 24, etc.) prior to initiating an RTZ ensures the
magnetic fields line up and increases the chances of a
successful pointer stall detection. It is important that the
pointer be in a static, or commanded, position before starting
the RTZ event. Because the time duration and the number of
steps the pointer moves prior to reaching the commanded
position can vary depending upon its status at the time a
position change is communicated, the master should make
sure that the rotor is not moving prior to starting an RTZ.
Cessation of movement can be inferred by monitoring the
CMD and/or the MOV status bits.
It should be pointed out, the flux value, for an ideal motor
with the coils perfectly aligned at 90°, will vary little from full
step to full step if all other variables, such as temperature, are
held constant. The full steps are evenly spaced, resulting in
equidistant movement as the motor is full stepped.
In comparison, motors [
that have
deleted PV] whose coils
aligned at a 60° angle [
will
deleted PV] results in two distinct
flux values as a the coils are driven in the same full step
fashion. This lack of symmetry in the measured flux is due to
the difference in the electrical angles between full steps.
Clearly stated, the distance the rotor moves changes from full
step to full step. This difference can be observed in
Figure 7
and
Table 5
.
In
Figure 7
, where PE6 = 0, the difference in microsteps
between alternating full steps (one coil at maximum current
while the other is at zero) is always six. In contrast, the same
figure illustrates PE6 = 1 showing the difference in
microsteps between full steps of the 60° coils alternating
between four and eight. These expected differences should
be taken into account when setting the RTZ threshold.
After completion of an RTZ, the 33977 automatically
assigns the zero step position to the full step position at the
end-stop location. Because the actual zero position could lie
anywhere within the full step where the zero was detected,
the assigned zero position could be within a window of ±0.5°.
An RTZ can be used to detect stall, even if the pointer rests
on the end-stop when RTZ sequence is initiated. However, it
is recommended to advance the pointer by at least 12
microsteps to the nearest full step prior to initiating the RTZ.
RTZ OUTPUT
During an RTZ event the non-driven coil is analyzed to
determine the state of the motor. The 33977 multiplexes the
coil voltages, [chgd PV
and provides
to read as active voice]
providing signal from the non-driven coil to the RTZ pin.
+
_
_
+
0
1
2
3
0
2
0
0
3
1
max
I
MAX
I
MAX
0
0
coil
I
COIL
I
coil
SINE
COSINE
Figure 9. FULLSTEPS (Counter Clockwise)
I
MAX
I
MAX
I
COIL
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MCZ33989EG | System Basis Chip with High-Speed CAN Transceiver |
| MCZ33990EF | Enhanced Class B Serial Transceiver |
| MCZ33991EG | Gauge Driver Integrated Circuit |
| MCZ33993EW | Multiple Switch Detection Interface |
| MCZ33996EK | 16-Output Switch with SPI Control |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MCZ33977EG | 制造商:Freescale Semiconductor 功能描述:IC STEPPER MOTOR GAUGE DRIVER SPI |
| MCZ33977EGR2 | 功能描述:馬達(dá)/運(yùn)動(dòng)/點(diǎn)火控制器和驅(qū)動(dòng)器 SINGLE GAUGE DR. LG. PTR RoHS:否 制造商:STMicroelectronics 產(chǎn)品:Stepper Motor Controllers / Drivers 類型:2 Phase Stepper Motor Driver 工作電源電壓:8 V to 45 V 電源電流:0.5 mA 工作溫度:- 25 C to + 125 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:HTSSOP-28 封裝:Tube |
| MCZ33989EG | 功能描述:網(wǎng)絡(luò)控制器與處理器 IC SBC-HS RoHS:否 制造商:Micrel 產(chǎn)品:Controller Area Network (CAN) 收發(fā)器數(shù)量: 數(shù)據(jù)速率: 電源電流(最大值):595 mA 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:PBGA-400 封裝:Tray |
| MCZ33989EG | 制造商:Freescale Semiconductor 功能描述:IC SYSTEM BASIS W/CAN TRANCEIVER |
| MCZ33989EGR2 | 功能描述:網(wǎng)絡(luò)控制器與處理器 IC SBC-HS RoHS:否 制造商:Micrel 產(chǎn)品:Controller Area Network (CAN) 收發(fā)器數(shù)量: 數(shù)據(jù)速率: 電源電流(最大值):595 mA 最大工作溫度:+ 85 C 安裝風(fēng)格:SMD/SMT 封裝 / 箱體:PBGA-400 封裝:Tray |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。