- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄385404 > HT82M9BAE (Holtek Semiconductor Inc.) USB Mouse Encoder 8-Bit MCU with EEPROM PDF資料下載
參數(shù)資料
| 型號(hào): | HT82M9BAE |
| 廠商: | Holtek Semiconductor Inc. |
| 英文描述: | USB Mouse Encoder 8-Bit MCU with EEPROM |
| 中文描述: | USB鼠標(biāo)編碼器8位微控制器帶有EEPROM |
| 文件頁數(shù): | 19/47頁 |
| 文件大?。?/td> | 336K |
| 代理商: | HT82M9BAE |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁當(dāng)前第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁
HT82M9BEE/HT82M9BAE
Rev. 1.20
19
August 13, 2007
Read operations
The data EEPROM supports three read operations,
namely, current address read, random address read
and sequential read. During read operation execution,
the read/write select bit should be set to 1 .
Current address read
The internal data word address counter maintains the
last address accessed during the last read or write op-
eration, incremented by one. This address stays valid
betweenoperationsaslongasthechippowerismain-
tained. The address roll over during read from the last
byte of the last memory page to the first byte of the
first page. The address roll over during write from the
last byte of the current page to the first byte of the
same page. Once the device address with the
read/write select bit set to one is clocked in and ac-
knowledged by the EEPROM, the current address
data word is serially clocked out. The microcontroller
should respond a No ACK (High) signal and following
stop condition (refer to Current read timing).
Random read
Arandomreadrequiresadummybytewritesequence
to load in the data word address which is then clocked
in and acknowledged by the EEPROM. The
microcontroller must then generate another start con-
dition. The microcontroller now initiates a current ad-
dress read by sending a device address with the
read/write select bit high. The EEPROM acknowl-
edges the device address and serially clocks out the
data word. The microcontroller should respond with a
no ACK signal (high) followed by a stop condition.
(refer to Random read timing).
Sequential read
Sequential reads are initiated by either a current ad-
dress read or a random address read. After the
microcontrollerreceivesadataword,itrespondswithan
acknowledgment. As long as the EEPROM receives an
acknowledgment, it will continue to increment the data
word address and serially clock out sequential data
words. When the memory address limit is reached, the
data word address will roll over and the sequential read
continues. The sequential read operation is terminated
when the microcontroller responds with a no ACK sig-
nal (high) followed by a stop condition.
! - /
-
!
! -
-
!
-
- /
-
0
! -
! -
0 0 - &
@
# -
) /
G 1
9
G 1 : H
; -
,
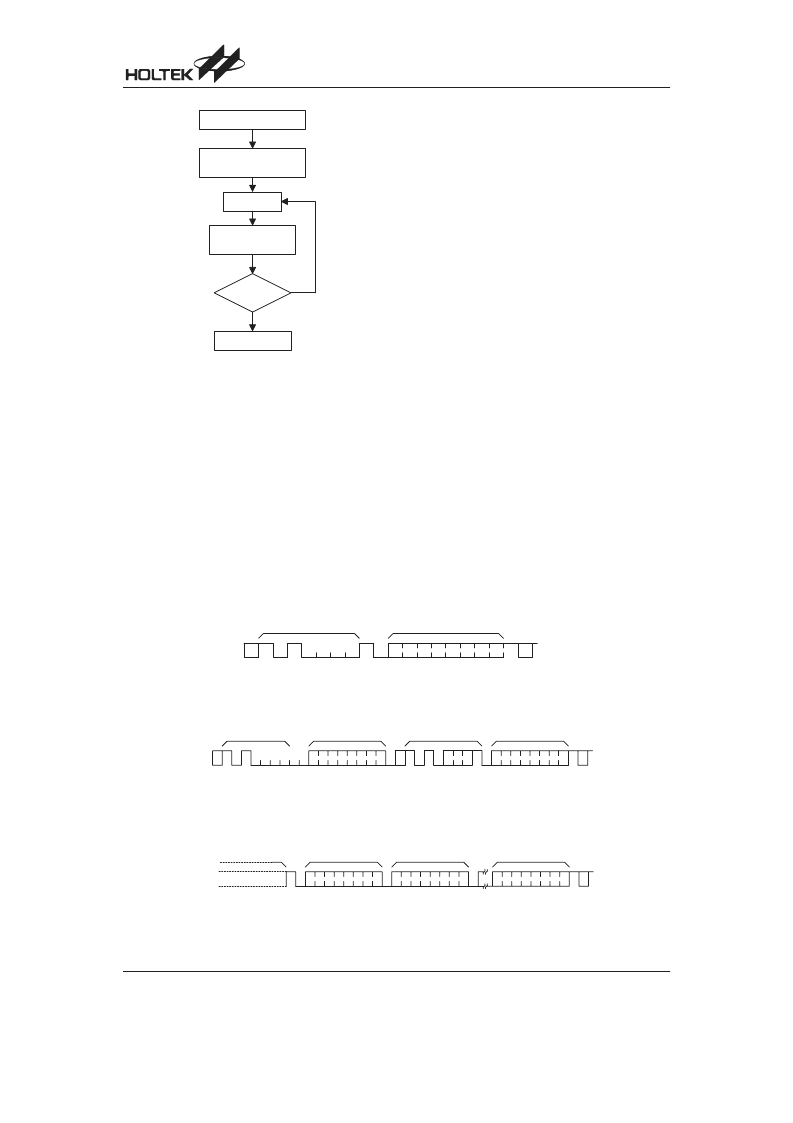
Acknowledge Polling Flow
A
- ! !
-
Current Read Timing
A
- ! !
/
! - ! !
-
A
- ! !
Random Read Timing
A
- ! !
-
- (
- ( ;
-
Sequential Read Timing
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| HT82M9BEE | USB Mouse Encoder 8-Bit MCU with EEPROM |
| HT82P604B | DC-DC Converter |
| HT82V14 | 14-Bit CCD/CIS Analog Signal Processor(14位CCD/CIS模擬信號(hào)處理器) |
| HT82V16 | 16-Bit CCD/CIS Analog Signal Processor(16位CCD/CIS模擬信號(hào)處理器) |
| HT82V24 | 16-Bit, 15MSPS, 3-Channel CCD/CIS Analog Signal Processor |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| HT82M9BEE | 制造商:HOLTEK 制造商全稱:Holtek Semiconductor Inc 功能描述:USB Mouse Encoder 8-Bit MCU with EEPROM |
| HT82P4352-16SOP | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Analog IC |
| HT82P604B | 制造商:HOLTEK 制造商全稱:Holtek Semiconductor Inc 功能描述:DC-DC Converter |
| HT82T20-20SOP | 制造商:未知廠家 制造商全稱:未知廠家 功能描述:Logic IC |
| HT82V14 | 制造商:HOLTEK 制造商全稱:Holtek Semiconductor Inc 功能描述:14-Bit CCD/CIS Analog Signal Processor |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。