- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄382648 > TMX320C6413ZTSA500 (Texas Instruments, Inc.) Fixed-Point Digital Signal Processors PDF資料下載
參數(shù)資料
| 型號: | TMX320C6413ZTSA500 |
| 廠商: | Texas Instruments, Inc. |
| 元件分類: | 數(shù)字信號處理 |
| 英文描述: | Fixed-Point Digital Signal Processors |
| 中文描述: | 定點數(shù)字信號處理器 |
| 文件頁數(shù): | 129/140頁 |
| 文件大小: | 1958K |
| 代理商: | TMX320C6413ZTSA500 |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁當(dāng)前第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁
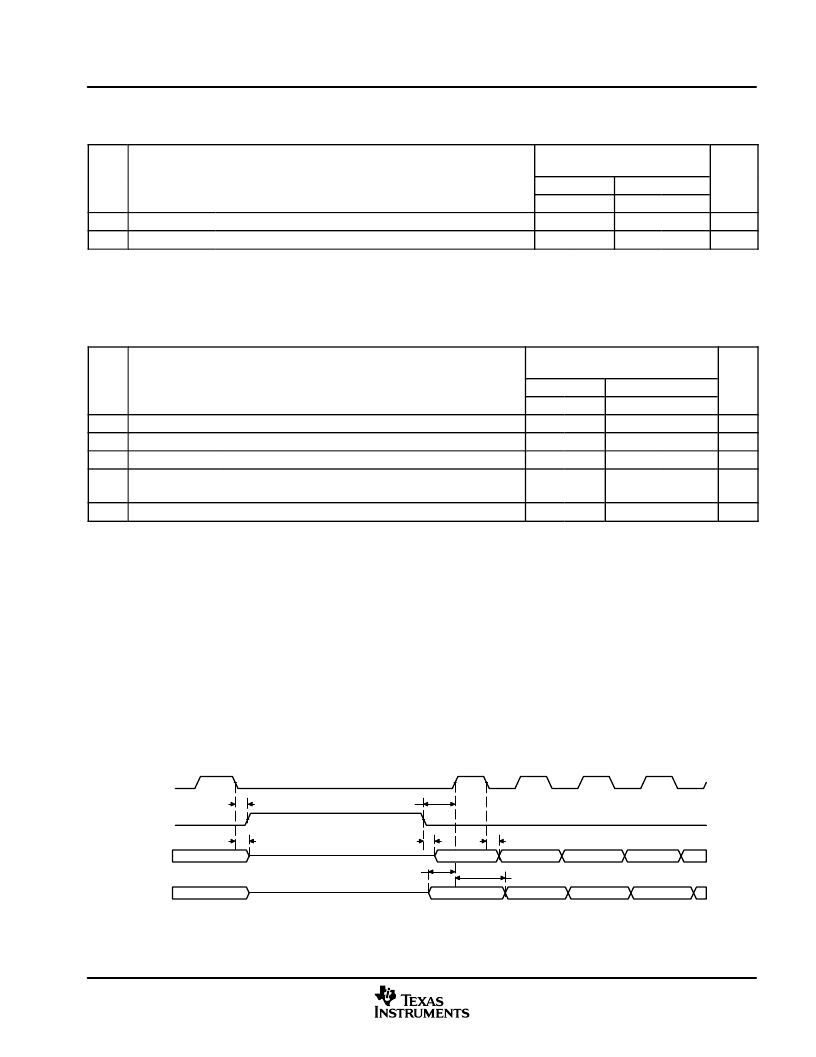
Multichannel Buffered Serial Port (McBSP) Timing
129
April 2004
Revised May 2005
SPRS247E
Table 7
31. Timing Requirements for McBSP as SPI Master or Slave:
CLKSTP = 11b, CLKXP = 0
(see Figure 7
39)
NO.
400
500
UNIT
MASTER
MIN
12
4
SLAVE
MIN
2
12P
5 + 24P
MAX
MAX
4
5
t
su(DRV-CKXH)
t
h(CKXH-DRV)
Setup time, DR valid before CLKX high
Hold time, DR valid after CLKX high
ns
ns
P = 1/CPU clock frequency in ns. For example, when running parts at 500 MHz, use P = 2 ns.
For all SPI Slave modes, CLKG is programmed as 1/4 of the CPU clock by setting CLKSM = CLKGDV = 1.
Table 7
32. Switching Characteristics Over Recommended Operating Conditions for McBSP as
SPI Master or Slave: CLKSTP = 11b, CLKXP = 0
(see Figure 7
39)
NO.
PARAMETER
400
500
UNIT
MASTER
§
MIN
L
2
T
2
2
SLAVE
MIN
MAX
L + 3
T + 3
MAX
1
2
3
t
h(CKXL-FXL)
t
d(FXL-CKXH)
t
d(CKXL-DXV)
Hold time, FSX low after CLKX low
Delay time, FSX low to CLKX high
#
Delay time, CLKX low to DX valid
Disable time, DX high impedance following last data bit from
CLKX low
ns
ns
ns
4
12P + 2.8
20P + 17
6
t
dis(CKXL-DXHZ)
2
4
12P + 3
20P + 17
ns
7
t
d(FXL-DXV)
Delay time, FSX low to DX valid
H
2
H + 4
8P + 2
16P + 17
ns
P = 1/CPU clock frequency in ns. For example, when running parts at 500 MHz, use P = 2 ns.
For all SPI Slave modes, CLKG is programmed as 1/4 of the CPU clock by setting CLKSM = CLKGDV = 1.
§
S =
Sample rate generator input clock = 4P if CLKSM = 1 (P = 1/CPU clock frequency)
=
Sample rate generator input clock = P_clks if CLKSM = 0 (P_clks = CLKS period)
T =
CLKX period = (1 + CLKGDV) * S
H =
CLKX high pulse width = (CLKGDV/2 + 1) * S if CLKGDV is even
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
L =
CLKX low pulse width
= (CLKGDV/2) * S if CLKGDV is even
= (CLKGDV + 1)/2 * S if CLKGDV is odd or zero
FSRP = FSXP = 1. As a SPI Master, FSX is inverted to provide active-low slave-enable output. As a Slave, the active-low signal input on FSX
and FSR is inverted before being used internally.
CLKXM = FSXM = 1, CLKRM = FSRM = 0 for Master McBSP
CLKXM = CLKRM = FSXM = FSRM = 0 for Slave McBSP
#
FSX should be low before the rising edge of clock to enable Slave devices and then begin a SPI transfer at the rising edge of the Master clock
(CLKX).
Bit 0
Bit(n-1)
(n-2)
(n-3)
(n-4)
Bit 0
Bit(n-1)
(n-2)
(n-3)
(n-4)
4
3
7
6
2
1
CLKX
FSX
DX
DR
5
Figure 7
39. McBSP Timing as SPI Master or Slave: CLKSTP = 11b, CLKXP = 0
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| TMX320C6413ZTS400 | Fixed-Point Digital Signal Processors |
| TMP320C6413ZTS400 | Fixed-Point Digital Signal Processors |
| TMX320C6413ZTS500 | Fixed-Point Digital Signal Processors |
| TMP320C6413ZTS500 | Fixed-Point Digital Signal Processors |
| TMX320C6413ZTSA400 | Fixed-Point Digital Signal Processors |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| TMX320C6414CGLZ300 | 制造商:TI 制造商全稱:Texas Instruments 功能描述:FIXED-POINT DIGITAL SIGNAL PROCESSORS |
| TMX320C6414CGLZ5 | 制造商:Rochester Electronics LLC 功能描述:- Bulk |
| TMX320C6414CGLZ5E0 | 制造商:TI 制造商全稱:Texas Instruments 功能描述:FIXED-POINT DIGITAL SIGNAL PROCESSORS |
| TMX320C6414CGLZA300 | 制造商:TI 制造商全稱:Texas Instruments 功能描述:FIXED-POINT DIGITAL SIGNAL PROCESSORS |
| TMX320C6414CGLZA5E0 | 制造商:TI 制造商全稱:Texas Instruments 功能描述:FIXED-POINT DIGITAL SIGNAL PROCESSORS |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。