- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄385820 > SCN68661 (NXP Semiconductors N.V.) Enhanced programmable communications interface EPCI PDF資料下載
參數(shù)資料
| 型號: | SCN68661 |
| 廠商: | NXP Semiconductors N.V. |
| 英文描述: | Enhanced programmable communications interface EPCI |
| 中文描述: | 增強(qiáng)的可編程通信接口到ePCI |
| 文件頁數(shù): | 11/19頁 |
| 文件大小: | 131K |
| 代理商: | SCN68661 |
Philips Semiconductors
Product specification
SCN2661/SCN68661
Enhanced programmable communications
interface (EPCI)
1994 Apr 27
11
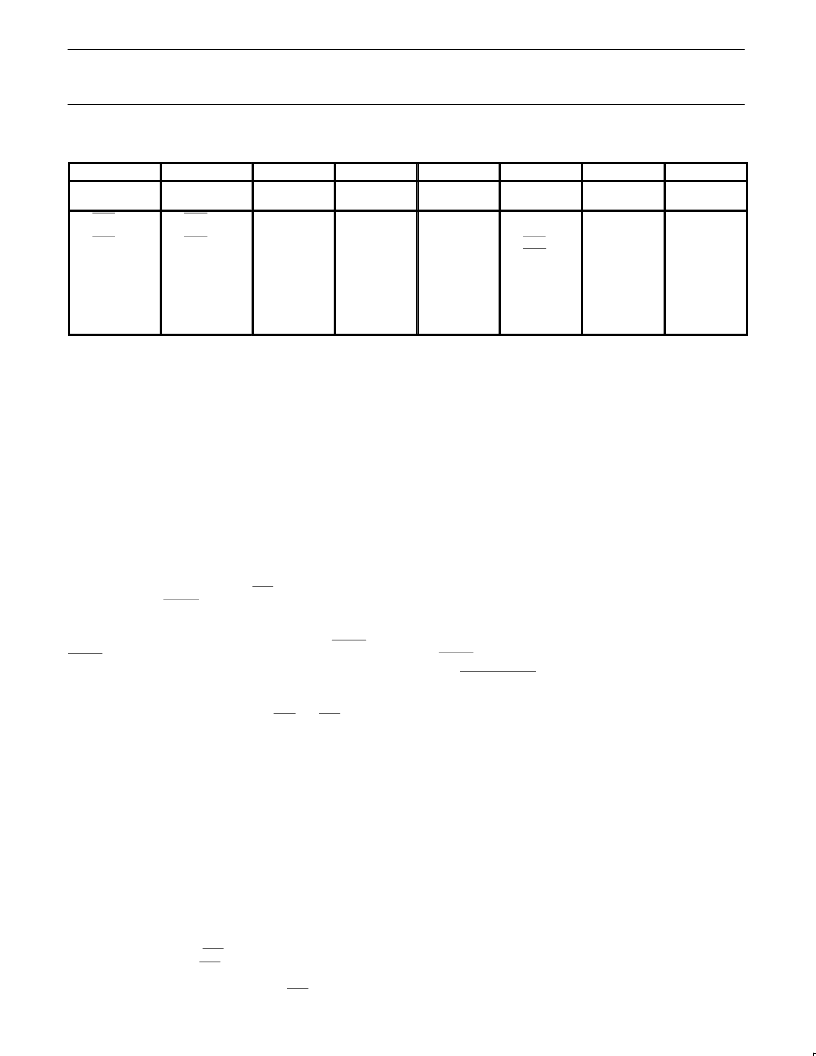
Table 8.
Status Register (SR)
SR7
SR6
SR5
SR4
SR3
SR2
SR1
SR0
Data Set
Ready
0 = DSR input
is High
1 = DSR input
is Low
Data Carrier
Detect
0 = DCD input
is High
1 = DCD input
is Low
FE/SYN
Detect
Async:
0 = Normal
1 = Framing
error
Overrun
PE/DLE
Detect
Async:
0 = Normal
1 = Parity error
TxEMT
DSCHG
0 = Normal
1 = Change in
DSR or
DCD, or
transmit
shift
register is
empty
RxRDY
TxRDY
Sync:
0 = Normal
1 = SYN
detected
0 = Normal
1 = Overrun
error
Sync:
0 = Normal
1 = Parity error
or DLE
received
0 = Receive
holding
register
empty
1 = Receive
holding
register
has data
0 = Transmit
holding
register
busy
1 = Transmit
holding
register
empty
Mode Register 2 (MR2)
Table 6 illustrates mode register 2. MR23, MR22, MR21 and MR20
control the frequency of the internal baud rate generator (BRG).
Sixteen rates are selectable for each EPCI version (–1,–2,–3).
Versions 1 and 2 specify a 4.9152MHz TTL input at BRCLK (pin 20);
version 3 specifies a 5.0688MHz input which is identical to the
Philips Semiconductors 2651. MR23 – 20 are don’t cares if external
clocks are selected (MR25 – MR24 = 0). The individual rates are
given in Table 1.
MR24 – MR27 select the receive and transmit clock source (either
the BRG or an external input) and the function at pins 9 and 25.
Refer to Table 6.
Command Register (CR)
Table 7 illustrates the command register. Bits CR0 (TxEN) and CR2
(RxEN) enable or disable the transmitter and receiver respectively.
A 0– to–1 transition of CR2 forces start bit search (async mode) or
hunt mode (sync mode) on the second RxC rising edge. Disabling
the receiver causes RxRDY to go High (inactive). If the transmitter
is disabled, it will complete the transmission of the character in the
transmit shift register (if any) prior to terminating operation. The TxD
output will then remain in the marking state (High) while TxRDY and
TxEMT will go High (inactive). If the receiver is disabled, it will
terminate operation immediately. Any character being assembled
will be neglected. A 0–to–1 transition of CR2 will initiate start bit
search (async) or hunt mode (sync).
Bits CR1 (DTR) and CR5 (RTS) control the DTR and RTS outputs.
Data at the outputs are the logical complement of the register data.
In asynchronous mode, setting CR3 will force and hold the TxD
output Low (spacing condition) at the end of the current transmitted
character. Normal operation resumes when CR3 is cleared. The
TxD line will go High for at least one bit time before beginning
transmission of the next character in the transmit data holding
register. In synchronous mode, setting CR3 causes the
transmission of the DLE register contents prior to sending the
character in the transmit data holding register. Since this is a one
time command, CR3 does not have to be reset by software. CR3
should be set when entering and exiting transparent mode and for
all DLE-non-DLE character sequences.
Setting CR4 causes the error flags in the status register (SR3, SR4,
and SR5) to be cleared; this is a one time command. There is no
internal latch for this bit.
When CR5 (RTS) is set, the RTS pin is forced Low. A 1–to–0
transition of CR5 will cause RTS to go High (inactive) one TxC time
after the last serial bit has been transmitted. If a 1–to–0 transition
of CR5 occurs while data is being transmitted, RTS will remain Low
(active) until both the THR and the transmit shift register are empty
and then go High (inactive) one TxC time later.
The EPCI can operate in one of four submodes within each major
mode (synchronous or asynchronous). The operational sub-mode is
determined by CR7 and CR6. CR7 – CR6 = 00 is the normal mode,
with the transmitter and receive operating independently in
accordance with the mode and status register instructions.
In asynchronous mode, CR7 – CR6 = 01 places the EPCI in the
automatic echo mode. Clocked, regenerated received data are
automatically directed to the TxD line while normal receiver
operation continues. The receiver must be enabled (CR2 = 1), but
the transmitter need not be enabled. CPU to receiver
communication continues normally, but the CPU to transmitter link is
disabled. Only the first character of a break condition is echoed.
The TxD output will go High until the next valid start is detected.
The following conditions are true while in automatic echo mode:
1. Data assembled by the receiver are automatically placed in the
transmit holding register and retransmitted by the transmitter on
the TxD output.
2. The transmitter is clocked by the receive clock.
3. TxRDY
output = 1.
4. The TxEMT/DSCHG pin will reflect only the data set change
condition.
5. The TxEN command (CR0) is ignored.
In synchronous mode, CR7 – CR6 = 01 places the EPCI in the
automatic SYN/DLE stripping mode. The exact action taken
depends on the setting of bits MR17 and MR16:
1. In the non-transparent, single SYN mode (MR17 – MR16 = 10),
characters in the data stream matching SYN1 are not transferred
to the Receive Data Holding register (RHR).
2. In the non-transparent, double SYN mode (MR17 – MR16 = 00),
character in the data stream matching SYN1, or SYN2 if immedi-
ately preceded by SYN1, are not transferred the RHR.
3. In transparent mode (MR16 = 1), character in the data stream
matching DLE, or SYN1 if immediately preceded by DLE, are not
transferred to the RHR. However, only the first DLE of a DLE–
DLE pair is stripped.
Note that automatic stripping mode does not affect the setting of the
DLE detect and SYN detect status bits (SR3 and SR5).
Two diagnostic sub-modes can also be configured. In local
loopback mode (CR7 – CR6 = 10), the following loops are
connected internally:
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| SCN2661BA1F28 | Enhanced programmable communications interface EPCI |
| SCN2661AC1A28 | Enhanced programmable communications interface EPCI |
| SCN2661AC1N28 | Enhanced programmable communications interface EPCI |
| SCN2661BC1A28 | Enhanced programmable communications interface EPCI |
| SCN2661BC1F28 | Enhanced programmable communications interface EPCI |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| SCN68681 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Dual asynchronous receiver/transmitter DUART |
| SCN68681C1A44 | 制造商:PHILIPS 功能描述:SCN68681C1A44 制造商:NXP Semiconductors 功能描述: 制造商:NXP Semiconductors 功能描述:UART, 44 Pin, Plastic, PLCC |
| SCN68681C1N40 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Dual asynchronous receiver/transmitter DUART |
| SCN68681E1A44 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Dual asynchronous receiver/transmitter DUART |
| SCN68681E1F40 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Dual asynchronous receiver/transmitter DUART |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。