- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄372115 > SAA7370A (NXP SEMICONDUCTORS) Digital servo processor and Compact Disc decoder CD7 PDF資料下載
參數(shù)資料
| 型號: | SAA7370A |
| 廠商: | NXP SEMICONDUCTORS |
| 元件分類: | 消費(fèi)家電 |
| 英文描述: | Digital servo processor and Compact Disc decoder CD7 |
| 中文描述: | SPECIALTY CONSUMER CIRCUIT, PQFP64 |
| 封裝: | 14 X 14 MM, 2.70 MM HEIGHT, PLASTIC, MS-022, SOT-393-1, QFP-64 |
| 文件頁數(shù): | 23/60頁 |
| 文件大小: | 248K |
| 代理商: | SAA7370A |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁當(dāng)前第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁
1998 Feb 26
23
Philips Semiconductors
Product specification
Digital servo processor and Compact Disc
decoder (CD7)
SAA7370A
7.13.1.4
CDV/CAV output mode
In the CDV motor mode, the FIFO position will be put in
pulse-width modulated form on the MOTO1 pin [carrier
frequency (300
×
d) Hz], where ‘d’ is the disc speed factor.
The PLL frequency signal will be put in pulse-density
modulated form (carrier frequency 4.23
×
n MHz) on the
MOTO2 pin. The integrated motor servo is disabled in this
mode.
The PWM signal on MOTO1 corresponds to a total
memory space of 20 frames, therefore the nominal FIFO
position (half full) will result in a PWM output of 60%.
In the lock to-disc (CAV) mode the CDV motor mode is the
only mode that can be used to control the motor.
7.13.2
S
PINDLE MOTOR OPERATING MODES
The operation modes of the motor servo is controlled by
register 1 (see Table 9).
In the SAA7370A decoder there is an anti-windup mode for
the motor servo, selected via register 1. When the
anti-wind-up mode is activated the motor servo integrator
will hold if the motor output saturates.
7.13.2.1
Power limit
In start mode 1, start mode 2, stop mode 1 and stop
mode 2, a fixed positive or negative voltage is applied to
the motor.
This voltage can be programmed as a percentage of the
maximum possible voltage, via register 6, to limit current
drain during start and stop.
The following power limits are possible;
100% (no power limit), 75%, 50%, or 37% of maximum.
7.13.3
L
OOP CHARACTERISTICS
The gain and crossover frequencies of the motor control
loop can be programmed via registers 4 and 5.
The following parameter values are possible;
Gains: 3.2, 4.0, 6.4, 8.0, 12.8, 16, 25.6 and 32
Crossover frequency f
4
: 0.5
×
n Hz, 0.7
×
n Hz,
1.4
×
n Hz, 2.8
×
n Hz
Crossover frequency f
3
: 0.85
×
n Hz, 1.71
×
n Hz,
3.42
×
n Hz
It should be noted that the crossover frequencies f
3
and f
4
are scaled with the overspeed factor ‘n’ whereas the gains
are not.
7.13.4
FIFO
OVERFLOW
If FIFO overflow occurs during Play mode (e.g.: as a result
of motor rotational shock), the FIFO will be automatically
reset to 50% and the audio interpolator tries to conceal as
much as possible to minimise the effect of data loss.
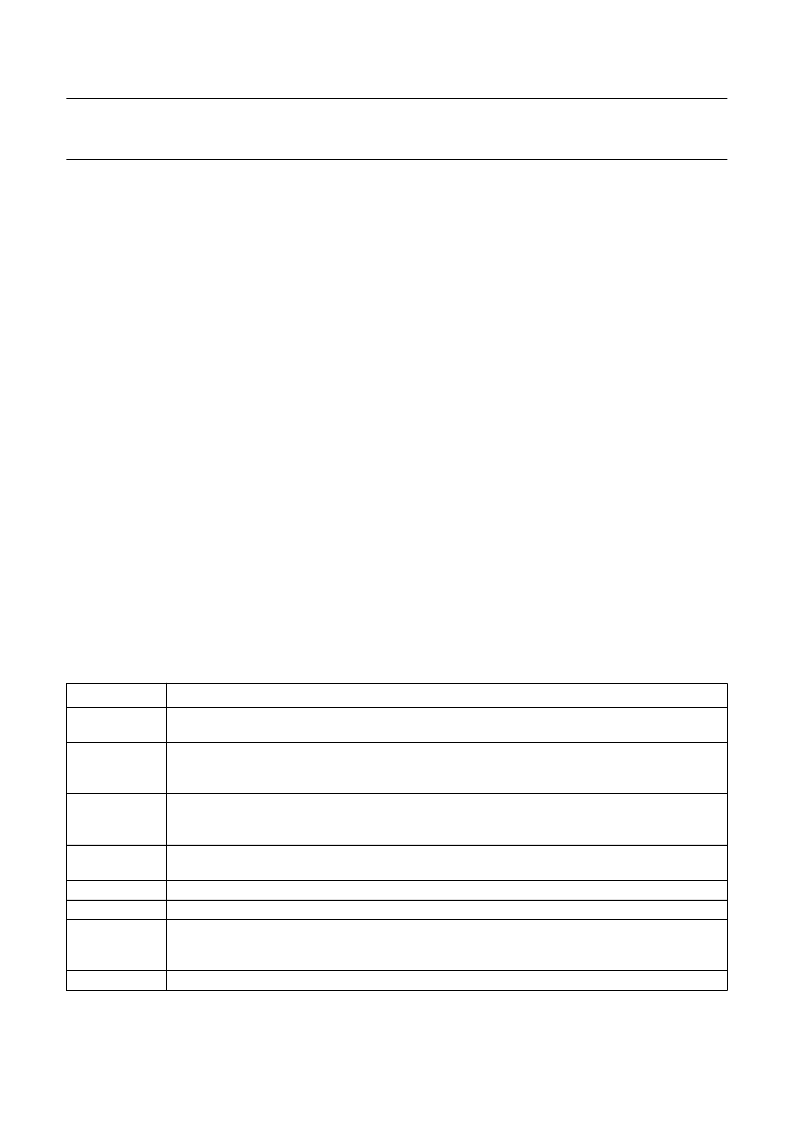
Table 9
Operating modes
MODE
DESCRIPTION
Start mode 1
The disc is accelerated by applying a positive voltage to the spindle motor. No decisions are
involved and the PLL is reset. No disc speed information is available for the microcontroller.
The disc is accelerated as in start mode 1, however the PLL will monitor the disc speed. When the
disc reaches 75% of its nominal speed, the controller will switch to jump mode. The motor status
signals selectable via register 2 are valid.
Motor servo enabled but FIFO kept reset at 50%, integrator is held. The audio is muted but it is
possible to read the subcode. It should be noted that in the CD-ROM modes the data, on EBU and
the I
2
S-bus is not muted.
Similar to jump mode but motor integrator is kept at zero. Used for long jumps where there is a large
change in disc speed.
FIFO released after resetting to 50%. Audio mute released.
Disc is braked by applying a negative voltage to the motor. No decisions are involved.
The disc is braked as in stop mode 1 but the PLL will monitor the disc speed. As soon as the disc
reaches 12% (or 6%, depending on the programmed brake percentage, via register E) of its
nominal speed, the MOTSTOP status signal will go HIGH and switch the motor servo to Off mode.
Motor not steered.
Start mode 2
Jump mode
Jump mode 1
Play mode
Stop mode 1
Stop mode 2
Off mode
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| SAA7370 | Digital servo processor and Compact Disc decoder CD7 |
| SAA7371 | Digital servo processor and Compact Disc decoder CD7 |
| SAA7371GP | Digital servo processor and Compact Disc decoder CD7 |
| SAA7372 | Digital servo processor and Compact Disc decoder CD7 |
| SAA7373 | Digital servo processor and Compact Disc decoder CD7 |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| SAA7371 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Digital servo processor and Compact Disc decoder CD7 |
| SAA7371GP | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Digital servo processor and Compact Disc decoder CD7 |
| SAA7372 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Digital servo processor and Compact Disc decoder CD7 |
| SAA7373 | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Digital servo processor and Compact Disc decoder CD7 |
| SAA7373GP | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:Digital servo processor and Compact Disc decoder CD7 |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。