- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄382368 > P82C150 (NXP Semiconductors N.V.) CAN Serial Linked I/O device SLIO with digital and analog port functions PDF資料下載
參數(shù)資料
| 型號(hào): | P82C150 |
| 廠商: | NXP Semiconductors N.V. |
| 英文描述: | CAN Serial Linked I/O device SLIO with digital and analog port functions |
| 中文描述: | CAN串行鏈接I / O與數(shù)字和模擬接口功能設(shè)備SLIO |
| 文件頁(yè)數(shù): | 17/36頁(yè) |
| 文件大小: | 209K |
| 代理商: | P82C150 |
第1頁(yè)第2頁(yè)第3頁(yè)第4頁(yè)第5頁(yè)第6頁(yè)第7頁(yè)第8頁(yè)第9頁(yè)第10頁(yè)第11頁(yè)第12頁(yè)第13頁(yè)第14頁(yè)第15頁(yè)第16頁(yè)當(dāng)前第17頁(yè)第18頁(yè)第19頁(yè)第20頁(yè)第21頁(yè)第22頁(yè)第23頁(yè)第24頁(yè)第25頁(yè)第26頁(yè)第27頁(yè)第28頁(yè)第29頁(yè)第30頁(yè)第31頁(yè)第32頁(yè)第33頁(yè)第34頁(yè)第35頁(yè)第36頁(yè)
1996 Jun 19
17
Philips Semiconductors
Preliminary specification
CAN Serial Linked I/O device (SLIO) with
digital and analog port functions
P82C150
7.3.4
CAN-
BUS MODES
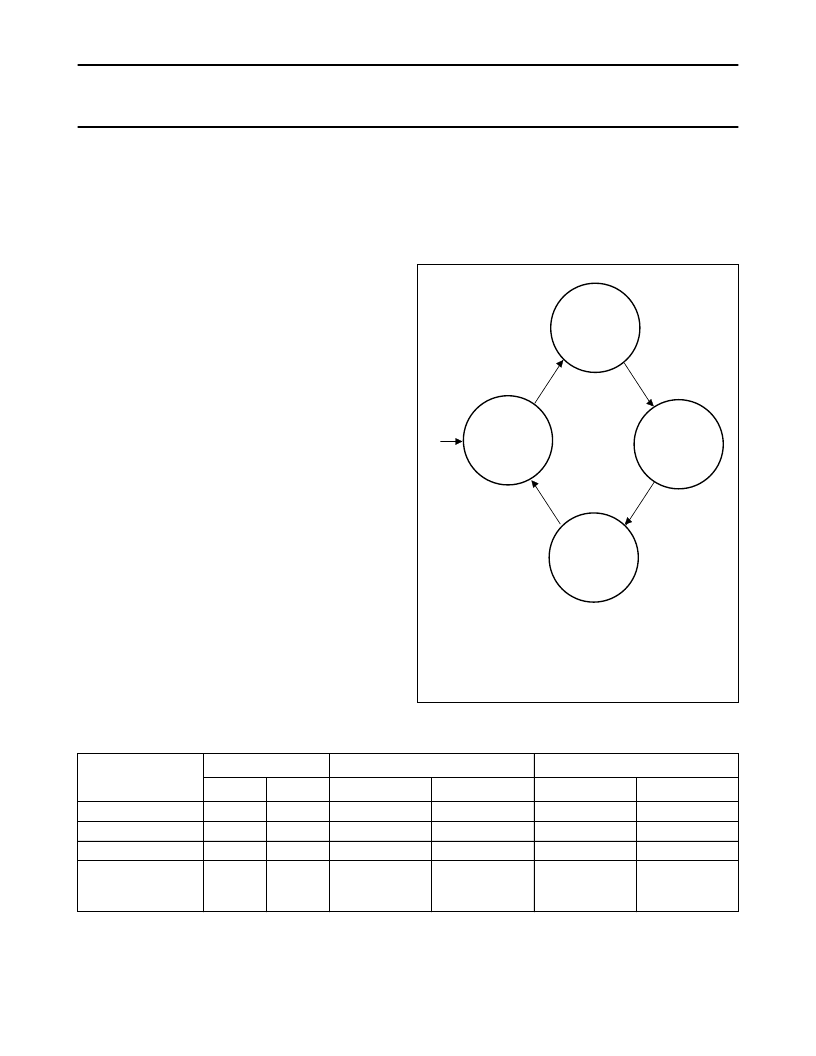
The P82C150 can pass through four CAN-bus modes
under certain conditions (see Fig.8). In the bus modes
0 to 2 (see Table 10) the P82C150 is operating with
different input comparator configurations. Bus mode 3 is
the power reduced Sleep Mode.
The bus modes support:
Communication on two balanced wires (differential
system)
Communication on one wire in a two-wire differential
system
Sleep Mode with wake-up via either a dominant signal
on RX0 or RX1 input
Connection of a second transmission medium
(redundancy)
There are two possibilities for condition 1 to switch to the
next mode (see Fig.8):
Overflow of the bit counter when 8192 is reached since
the last calibration message
Overflow of the Transmit Error Counter (>255; bus-off
limit reached).
When the bus mode changes, all I/O Registers are cleared
and outputs become floating (OE bits cleared). That
means the I/O ports return to a fail-safe state whenever the
P82C150 looses connection to its host controller. This is a
kind of network watchdog function. The status bits are set
to the following values after a bus mode change:
RSTD = 1
EW = 0
BM
new
= BM
old
+ 1.
The programmed Identifier bits remain unchanged.
After reset the P82C150 changes directly into bus mode 3
(Sleep Mode). During Sleep Mode, the internal RC
oscillator is stopped, and all the output drivers are disabled
(I/O Register contents cleared). A P82C150 in Sleep Mode
can be woken up via CAN-bus lines (dominant level on
RX0 or RX1) or by a reset condition.
Fig.8 CAN-bus modes and switch-over conditions.
columns
DIFFERENTIAL
MODE
Inputs: RX0, RX1
Outputs: TX0, TX1
'0'
ONE-WIRE
RX1 MODE
Input: RX1
Outputs: TX0, TX1
'1'
'2'
SLEEP
MODE
Inputs: RX0, RX1
Outputs: no
'3'
ONE-WIRE
RX0 MODE
Input: RX0
Output: TX0
Condition 1
Condition 1
Condition 1
Condition 2
MHA070
end of
RESET
Condition 1:
bit counter overflow (>8191) or Transmit Error Counter overflow (>255).
Condition 2:
dominant bit detected on RX0 and RX1.
Table 10
Can-bus modes
Note
1.
Output TX1 is disabled in bus mode 2 to tolerate short-circuit between the CAN-bus wires CAN_H and CAN_L.
BUS MODE
BITS
RECEPTION LEVEL
TRANSMISSION
BM1
BM0
RECESSIVE
DOMINANT
TX1
TX0
0 = Differential
1 = One-wire RX1
2 = One-wire RX0
3 = Sleep
0
0
1
1
0
1
0
1
RX0 > RX1
RX1 < REF
RX0 > REF
RX0 > REF
and
RX1 < REF
RX0 < RX1
RX1 > REF
RX0 < REF
RX0 < REF
or
RX1 > REF
enabled
enabled
disabled
disabled
enabled
enabled
enabled
disabled
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| P82C150AFT | CAN Serial Linked I/O device SLIO with digital and analog port functions |
| P82C150AHT | 22 PIN R/A MALE PRESSFIT ATCA ZONE 1 CON |
| P82C605 | System Controller |
| P82C606 | System Controller |
| P82C607 | Peripheral IC |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| P82C150AFT | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:CAN Serial Linked I/O device SLIO with digital and analog port functions |
| P82C150AHT | 制造商:PHILIPS 制造商全稱:NXP Semiconductors 功能描述:CAN Serial Linked I/O device SLIO with digital and analog port functions |
| P82C201-10 | 制造商:CHIPS 功能描述: 制造商:CHIP 功能描述:SYSTEM CONTROLLER, 84 Pin, PLCC 制造商:CHIPS 功能描述:SYSTEM CONTROLLER, 84 Pin, PLCC |
| P82C201-10 TS89 | 制造商:TOS 功能描述:82C201-10 |
| P82C201-10-7014-0093 | 制造商:CHIPS 功能描述: |
發(fā)布緊急采購(gòu),3分鐘左右您將得到回復(fù)。