- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄382305 > MC3PHACVP (MOTOROLA INC) 3-Phase AC Motor Controller PDF資料下載
參數(shù)資料
| 型號: | MC3PHACVP |
| 廠商: | MOTOROLA INC |
| 元件分類: | 運動控制電子 |
| 英文描述: | 3-Phase AC Motor Controller |
| 中文描述: | AC MOTOR CONTROLLER, PDIP28 |
| 封裝: | PLASTIC, DIP-28 |
| 文件頁數(shù): | 13/44頁 |
| 文件大小: | 724K |
| 代理商: | MC3PHACVP |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁當前第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁
MC3PHAC/D
Features
MOTOROLA
3-Phase AC Motor Controller
13
Selectable Base Frequency
— Alternating current (ac) motors are designed
to accept rated voltage at either 50 or 60 Hz, depending on what region of the
world they were designed to be used. The MC3PHAC can accommodate both
types of motors by allowing the voltage profile to reach maximum value at either
50 or 60 Hz. This parameter can be specified at initialization in standalone
mode, or it can be changed at any time in PC master software mode.
Selectable PWM Polarity
—
The polarity of the PWM outputs may be specified
such that a logic high on a PWM output can either be the asserted or negated
state of the signal. In standalone mode, this parameter is specified at
initialization and applies to all six PWM outputs. In PC master software mode,
the polarity of the top PWM signals can be specified separately from the polarity
of the bottom PWM signals.
This specification can be done at any time, but once it is done, the polarities are
locked and cannot be changed until a reset occurs. Also, any commands from
PC master software that would have the effect of enabling PWMs are
prevented by the MC3PHAC until the polarity has been specified.
In standalone mode, the base frequency and PWM polarity are specified at the
same time during initialization by connecting either pin 25, 26, 27, or 28
exclusively to the PWMPOL_BASEFREQ input. During initialization, pins 25,
26, 27, and 28 are cycled one at a time to determine which one has been
connected to the PWMPOL_BASEFREQ input.
Table 3
shows the selected PWM polarity and base frequency as a function of
which pin connection is made. Refer to the standalone mode schematic,
Figure 8
. Only one of these jumpers (JP1–JP4) can be connected at any one
time.
NOTE:
It is not necessary to break this connection once the initialization phase has
been completed. The MC3PHAC will function properly while this connection is
in place.
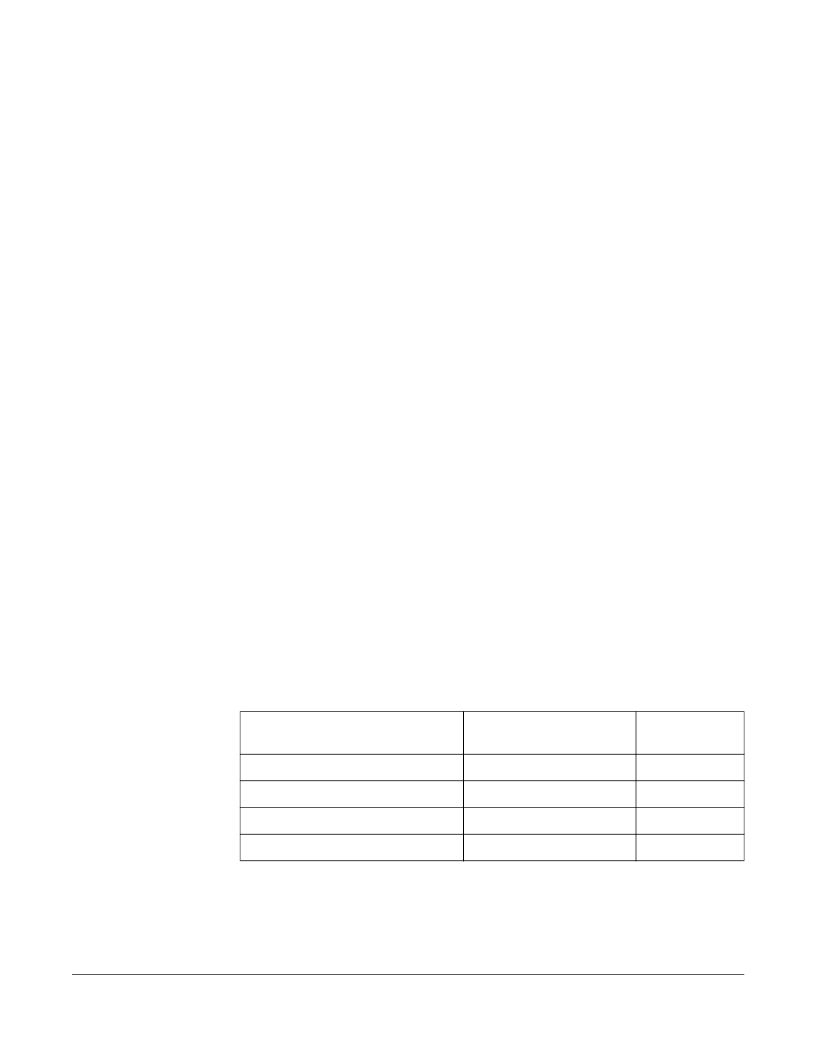
Table 3. PWM Polarity and Base Frequency
Specification in Standalone Mode
Pin Connected to
PWMPOL_BASEFREQ Pin
PWM Polarity
Base
Frequency
MUX_IN (JP1)
Logic low = on
50 Hz
SPEED (JP2)
Logic high = on
50 Hz
ACCEL (JP3)
Logic low = on
60 Hz
DC_BUS (JP4)
Logic high = on
60 Hz
F
Freescale Semiconductor, Inc.
For More Information On This Product,
Go to: www.freescale.com
n
.
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| MC3S12C128 | 16-Bit Microcontroller |
| MC3S12C32 | 16-Bit Microcontroller |
| MC3S12C64 | 16-Bit Microcontroller |
| MC3S12C96 | 16-Bit Microcontroller |
| MC3S12GC32 | 16-Bit Microcontroller |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| MC3PHACVPE | 功能描述:馬達/運動/點火控制器和驅(qū)動器 8BIT MCU 8K FLASH OTP RoHS:否 制造商:STMicroelectronics 產(chǎn)品:Stepper Motor Controllers / Drivers 類型:2 Phase Stepper Motor Driver 工作電源電壓:8 V to 45 V 電源電流:0.5 mA 工作溫度:- 25 C to + 125 C 安裝風格:SMD/SMT 封裝 / 箱體:HTSSOP-28 封裝:Tube |
| MC3S12C128 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:16-Bit Microcontroller |
| MC3S12C32 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:16-Bit Microcontroller |
| MC3S12C64 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:16-Bit Microcontroller |
| MC3S12C96 | 制造商:MOTOROLA 制造商全稱:Motorola, Inc 功能描述:16-Bit Microcontroller |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。