- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄375254 > ADE7761AARSZ (ANALOG DEVICES INC) Energy Metering IC with On-Chip Fault and Missing Neutral Detection PDF資料下載
參數(shù)資料
| 型號: | ADE7761AARSZ |
| 廠商: | ANALOG DEVICES INC |
| 元件分類: | 模擬信號調(diào)理 |
| 英文描述: | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| 中文描述: | SPECIALTY ANALOG CIRCUIT, PDSO20 |
| 封裝: | LEAD FREE, M0-150AE, SSOP-20 |
| 文件頁數(shù): | 18/24頁 |
| 文件大?。?/td> | 367K |
| 代理商: | ADE7761AARSZ |
ADE7761A
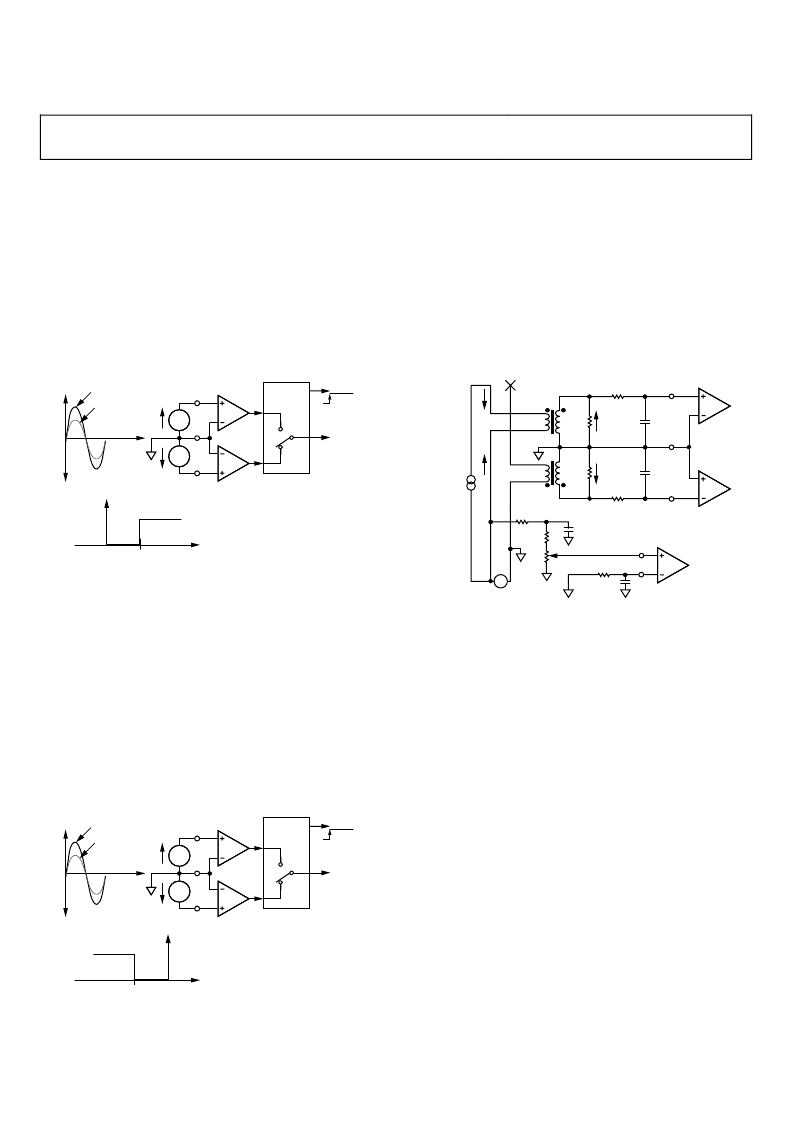
Fault with Active Input Greater than Inactive Input
If V
1A
is the active current input (that is, being used for billing),
and the voltage signal on V
1B
(inactive input) falls below 93.75%
of V
1A
, the fault indicator becomes active. Both analog inputs
are filtered and averaged to prevent false triggering of this logic
output. As a consequence of the filtering, there is a time delay of
approximately 3 sec on the logic output FAULT after the fault
event. The FAULT logic output is independent of any activity on
outputs F1 or F2. Figure 28 shows one condition under which
FAULT becomes active. Because V
1A
is the active input and it is
still greater than V
1B
, billing is maintained on V
1A
, that is, no
swap to the V
1B
input occurs. V
1A
remains the active input.
Rev. 0 | Page 18 of 24
V
1B
V
1N
V
1A
AGND
FILTER
AND
COMPARE
TO
MULTIPLIER
FAULT
A
B
V
1A
V
1B
V
1B
< 93.75% OF V
1A
>0
<0
ACTIVE POINT – INACTIVE INPUT
6.25% OF ACTIVE INPUT
0
0V
FAULT
V
1A
V
1B
Figure 28. Fault Conditions for Active Input Greater than Inactive Input
Fault with Inactive Input Greater than Active Input
Figure 29 illustrates another fault condition. If the difference
between V
1B
, the inactive input, and V
1A
, the active input (that
is, being used for billing), becomes greater than 6.25% of V
1B
,
the FAULT indicator becomes active and a swap over to the V
1B
input occurs. The analog input V
1B
becomes the active input.
Again, a time constant of about 3 sec is associated with this
swap. V
1A
does not swap back to the active channel until V
1A
is
greater than V
1B
and the difference between V
1A
and V
1B
—in
this order—becomes greater than 6.25% of V
1A
. However, the
FAULT indicator becomes inactive as soon as V
1A
is within
6.25% of V
1B
. This threshold eliminates potential chatter
between V
1A
and V
1B
.
V
1B
V
1N
V
1A
AGND
FILTER
AND
COMPARE
TO
MULTIPLIER
FAULT
A
B
V
1A
V
1B
V
1A
< 93.75% OF V
1B
>0
<0
ACTIVE POINT – INACTIVE INPUT
6.25% OF INACTIVE INPUT
0
0V
FAULT + SWAP
V
1A
V
1B
Figure 29. Fault Conditions for Inactive Input Greater than Active Input
Calibration Concerns
Typically, when a meter is being calibrated, the voltage and
current circuits are separated, as shown in Figure 30. This
means that current passes through only the phase or neutral
circuit. Figure 30 shows current being passed through the phase
circuit. This is the preferred option because the ADE7761A
starts billing on the input V
1A
on power-up. The phase circuit
CT is connected to V
1A
in Figure 30. Because there is no current
in the neutral circuit, the FAULT indicator comes on under
these conditions. However, this does not affect the accuracy of
the calibration and can be used as a means to test the functionality
of the fault detection.
AGND
V
1B
V
1N
V
1A
R
F
R
F
C
F
C
F
CT
CT
RB
RB
0V
V
1A
IB
IB
P
N
1
RB + VR = RF.
VR
1
RB
1
RA
1
V
2P
R
F
V
2N
C
T
C
F
V
TEST
CURRENT
240V rms
0
Figure 30. Conditions for Calibration of Channel B
If the neutral circuit is chosen for the current circuit in the
arrangement shown in Figure 30, this may have implications for
the calibration accuracy. The ADE7761A powers up with the
V
1A
input active as normal. However, because there is no
current in the phase circuit, the signal on V
1A
is zero. This
causes a fault to be flagged and the active input to be swapped
to V
1B
(neutral). The meter can be calibrated in this mode, but
the phase and neutral CTs may differ slightly. Because under
no-fault conditions all billing is carried out using the phase CT,
the meter should be calibrated using the phase circuit. Of
course, both phase and neutral circuits can be calibrated.
MISSING NEUTRAL MODE
The ADE7761A integrates a novel fault detection that warns
and allows the ADE7761A to continue to bill in case a meter is
connected to only one wire (see Figure 31). For correct
operation of the ADE7761A in this mode, the V
DD
pin of the
ADE7761A must be maintained within the specified range (5 V
± 5%). The missing neutral detection algorithm is designed to
work over a line frequency of 45 Hz to 55 Hz.
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| ADE7761AARSZ-RL | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| ADE7761 | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| ADE7761ARS | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| ADE7761ARS-REF | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| ADE7761ARSRL | Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| ADE7761AARSZ-RL | 功能描述:IC ENERGY METERING 1PHASE 20SSOP RoHS:是 類別:集成電路 (IC) >> PMIC - 能量測量 系列:- 產(chǎn)品培訓(xùn)模塊:Lead (SnPb) Finish for COTS Obsolescence Mitigation Program 標(biāo)準(zhǔn)包裝:2,500 系列:* |
| ADE7761ARS | 制造商:Rochester Electronics LLC 功能描述: 制造商:Analog Devices 功能描述: |
| ADE7761ARS-REF | 制造商:Analog Devices 功能描述:ENERGY METER IC W/FAULT&MNEUT DETEC. - Bulk |
| ADE7761ARSRL | 制造商:AD 制造商全稱:Analog Devices 功能描述:Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
| ADE7761B | 制造商:AD 制造商全稱:Analog Devices 功能描述:Energy Metering IC with On-Chip Fault and Missing Neutral Detection |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。