- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄370874 > M38026M6D896FS (Mitsubishi Electric Corporation) Circular Connector; MIL SPEC:MIL-C-5015 A/B/C; Body Material:Aluminum Alloy; Series:CS3100; No. of Contacts:14; Connector Shell Size:36; Connecting Termination:Solder; Circular Shell Style:Wall Mount Receptacle; Body Style:Straight RoHS Compliant: No PDF資料下載
參數(shù)資料
| 型號: | M38026M6D896FS |
| 廠商: | Mitsubishi Electric Corporation |
| 元件分類: | 圓形連接器 |
| 英文描述: | Circular Connector; MIL SPEC:MIL-C-5015 A/B/C; Body Material:Aluminum Alloy; Series:CS3100; No. of Contacts:14; Connector Shell Size:36; Connecting Termination:Solder; Circular Shell Style:Wall Mount Receptacle; Body Style:Straight RoHS Compliant: No |
| 中文描述: | 8位單片機(jī) |
| 文件頁數(shù): | 161/207頁 |
| 文件大小: | 2389K |
| 代理商: | M38026M6D896FS |
第1頁第2頁第3頁第4頁第5頁第6頁第7頁第8頁第9頁第10頁第11頁第12頁第13頁第14頁第15頁第16頁第17頁第18頁第19頁第20頁第21頁第22頁第23頁第24頁第25頁第26頁第27頁第28頁第29頁第30頁第31頁第32頁第33頁第34頁第35頁第36頁第37頁第38頁第39頁第40頁第41頁第42頁第43頁第44頁第45頁第46頁第47頁第48頁第49頁第50頁第51頁第52頁第53頁第54頁第55頁第56頁第57頁第58頁第59頁第60頁第61頁第62頁第63頁第64頁第65頁第66頁第67頁第68頁第69頁第70頁第71頁第72頁第73頁第74頁第75頁第76頁第77頁第78頁第79頁第80頁第81頁第82頁第83頁第84頁第85頁第86頁第87頁第88頁第89頁第90頁第91頁第92頁第93頁第94頁第95頁第96頁第97頁第98頁第99頁第100頁第101頁第102頁第103頁第104頁第105頁第106頁第107頁第108頁第109頁第110頁第111頁第112頁第113頁第114頁第115頁第116頁第117頁第118頁第119頁第120頁第121頁第122頁第123頁第124頁第125頁第126頁第127頁第128頁第129頁第130頁第131頁第132頁第133頁第134頁第135頁第136頁第137頁第138頁第139頁第140頁第141頁第142頁第143頁第144頁第145頁第146頁第147頁第148頁第149頁第150頁第151頁第152頁第153頁第154頁第155頁第156頁第157頁第158頁第159頁第160頁當(dāng)前第161頁第162頁第163頁第164頁第165頁第166頁第167頁第168頁第169頁第170頁第171頁第172頁第173頁第174頁第175頁第176頁第177頁第178頁第179頁第180頁第181頁第182頁第183頁第184頁第185頁第186頁第187頁第188頁第189頁第190頁第191頁第192頁第193頁第194頁第195頁第196頁第197頁第198頁第199頁第200頁第201頁第202頁第203頁第204頁第205頁第206頁第207頁
3802 GROUP USER’S MANUAL
3-35
APPENDIX
3.5 List of registers
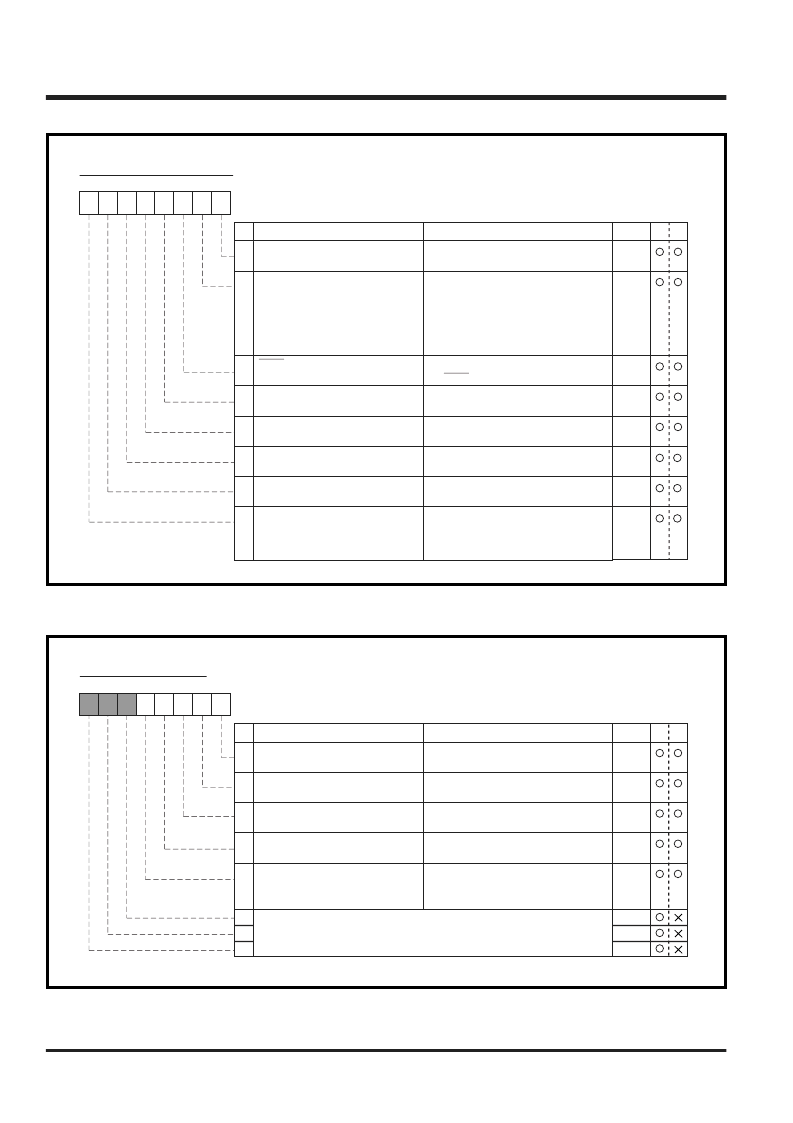
Fig. 3.5.5 Structure of Serial I/O1 control register
Serial I/O1 synchronous clock
selection bit (SCS)
S
RDY1
output enable bit
(SRDY)
Transmit interrupt
source selection bit (TIC)
Transmit enable bit (TE)
Serial I/O1 control register
b7 b6 b5 b4 b3 b2 b1 b0
B
0
Function
At reset
R W
0
1
2
3
0 : f(X
IN
)
1 : f(X
IN
)/4
At selecting clock synchronous serial I/O
0 : BRG output divided by 4
1 : External clock input
At selecting UART
0 : BRG output divided by 16
1 : External clock input divided by 16
0
0
0
Serial I/O1 control register (SIO1CON) [Address : 1A
16
]
Name
BRG count source selection
bit (CSS)
4
5
6
7
0
0
0
0
Serial I/O1 enable bit (SIOE)
0 : I/O port (P4
7
)
1 :
S
RDY1
output pin
0 :
Transmit buffer empty
1 :
Transmit shift operating completion
0 : Transmit disabled
1 : Transmit enabled
0 : Receive disabled
1 : Receive enabled
0 : UART
1 : Clock synchronous serial I/O
0 :
Serial I/O1 disabled
(P4
4
–P4
7
:
I/O port)
1 :
Serial I/O1 enabled
(P4
4
–P4
7
:
Serial I/O function pin)
Receive enable bit (RE)
Serial I/O1 mode
selection bit (SIOM)
Fig. 3.5.6 Structure of UART control register
In output mode
0 : CMOS output
1 : N-channel open-drain output
UART control register
b7 b6 b5 b4 b3 b2 b1 b0
B
0
Function
At reset
R W
0
1
2
3
0
0
0
UART control register (UARTCON) [Address : 1B
16
]
Name
0
1
1
1
0 : 8 bits
1 : 7 bits
0 : Parity checking disabled
1 : Parity checking enabled
0 : Even parity
1 : Odd parity
0 : 1 stop bit
1 : 2 stop bits
Character length
selection bit (CHAS)
Parity enable bit
(PARE)
Parity selection bit
(PARS)
Stop bit length
selection bit (STPS)
P4
5
/TxD P-channel
output disable bit (POFF)
5
6
7
4
Nothing is allocated for these bits. These are write disabled
bits. When these bits are read out, the values are “1.”
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| M38026M6D896SP | 1 watt dc-dc converters |
| M38026M6D896SS | 1 watt dc-dc converters |
| M38027E1D1024SS | 1 watt dc-dc converters |
| M38027E2-1024FP | 1 watt dc-dc converters |
| M38027E2-1024FS | 1 watt dc-dc converters |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| M38027E8FP | 制造商:Renesas Electronics Corporation 功能描述:M16C FLASH 256K/20K, 24MHZ,DMA,I2C,IEBU - Trays |
| M38027E8FP#U0 | 制造商:Renesas Electronics Corporation 功能描述:M16C FLASH 256K/20K, 24MHZ,DMA,I2C,IEBU -LEAD FREE VERSION - Trays |
| M38027E8FS | 制造商:Renesas Electronics Corporation 功能描述:MCU 8BIT 740 CISC 32KB EPROM 3.3V/5V 64CLCC - Bulk |
| M38027E8SS | 制造商:Renesas Electronics Corporation 功能描述:MCU 8BIT 740 CISC 32KB EPROM 3.3V/5V 64PIN SDIP - Bulk |
| M3802-BLACK-100 | 制造商:Alpha Wire 功能描述: |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。