- 您現(xiàn)在的位置:買賣IC網(wǎng) > PDF目錄359067 > M48TMH1 (意法半導體) 5V PC REAL TIME CLOCK PDF資料下載
參數(shù)資料
| 型號: | M48TMH1 |
| 廠商: | 意法半導體 |
| 英文描述: | 5V PC REAL TIME CLOCK |
| 中文描述: | 5V的電腦實時時鐘 |
| 文件頁數(shù): | 13/23頁 |
| 文件大小: | 163K |
| 代理商: | M48TMH1 |
13/23
M48T86
read valid time and date information. If this inter-
rupt is used, the IRQF bit (Register C; Bit 7) should
be cleared before leaving the interrupt routine.
A second method uses the Update-In-Progress
(UIP) bit (Register A; Bit 7) to determine if the up-
date cycle is in progress. The UIP bit will pulse
once per second. After the UIP bit goes high, the
update transfer occurs 244μs later. If a low is read
on the UIP bit, the user has at least 244μs before
the time/calendar data will be changed. Therefore,
the user should avoid interrupt service routines
that would cause the time needed to read valid
time/calendar data to exceed 244μs.
The third method uses a periodic interrupt to deter-
mine if an update cycle is in progress. The UIP bit
is set high between the setting of the PF bit (Reg-
ister C; Bit 6). Periodic interrupts that occur at a
rate greater than t
BUC
allow valid time and date in-
formation to be reached at each occurrence of the
periodic interrupt.The reads should be completed
within 1/(t
PL/2
+ t
BUC
) to ensure that data is not
read during the update cycle.
UPDATE CYCLE
The M48T86 executes an update cycle once per
second regardless of the SET bit (Register B; Bit
7). When the SET bit is asserted, the user copy of
the double buffered time, calendar, and alarm
bytes is frozen and will not update as the time in-
crements. However, the time countdown chain
continues to update the internal copy of the buffer.
This feature allows accurate time to be main-
tained, independent of reading and writing the
time, calendar, and alarm buffers. This also guar-
antees that the time and calendar information will
be consistent. The update cycle also compares
each alarm byte with the corresponding time byte
and issues an alarm if a match or if a "don't care"
code is present in all three positions.
There are three methods of accessing the real
time clock that will avoid any possibility of obtain-
ing inconsistent time and calendar data. The first
method uses the update-ended interrupt. If en-
abled, an interrupt occurs after every update cycle
which indicates that over 999ms are available to
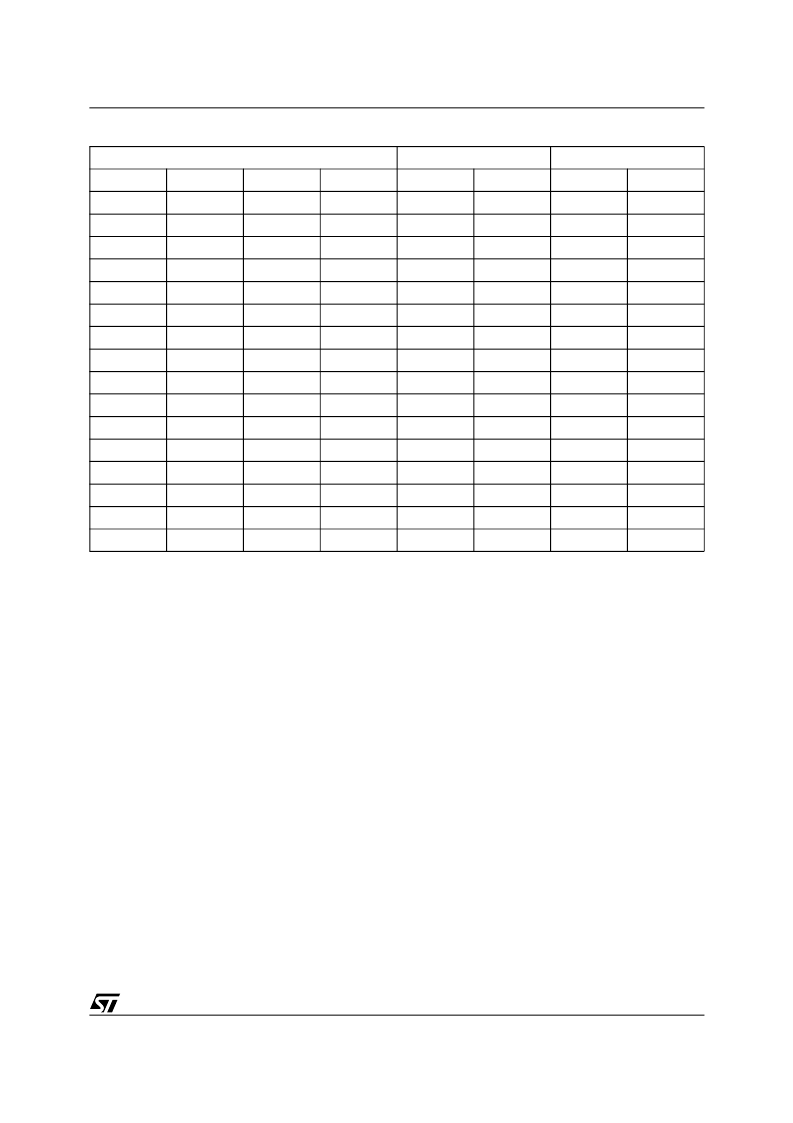
Table 10. Square Wave Frequency/Periodic Interrupt Rate
Register A Bits
Square Wave
Periodic Interrupt
RS3
RS2
RS1
RS0
Frequency
Units
Period
Units
0
0
0
0
None
None
0
0
0
1
256
Hz
3.90625
ms
0
0
1
0
128
Hz
7.8125
ms
0
0
1
1
8.192
kHz
122.070
us
0
1
0
0
4.096
kHz
244.141
us
0
1
0
1
2.048
kHz
488.281
us
0
1
1
0
1.024
kHz
976.5625
us
0
1
1
1
512
Hz
1.953125
ms
1
0
0
0
256
Hz
3.90625
ms
1
0
0
1
128
Hz
7.8125
ms
1
0
1
0
64
Hz
15.625
ms
1
0
1
1
32
Hz
31.25
ms
1
1
0
0
16
Hz
62.5
ms
1
1
0
1
8
Hz
125
ms
1
1
1
0
4
Hz
250
ms
1
1
1
1
2
Hz
500
ms
相關(guān)PDF資料 |
PDF描述 |
|---|---|
| M48TMH1TR | 5V PC REAL TIME CLOCK |
| M48TY-85MH1 | 3.3V-5V TIMEKEEPER CONTROLLER |
| M48TY-85MH1TR | 3.3V-5V TIMEKEEPER CONTROLLER |
| M48TY-85PM1 | 3.3V-5V 1 Mbit 128Kb x8 TIMEKEEPER SRAM |
| M48Z02 | 16 Kbit 2Kb x 8 ZEROPOWER SRAM |
相關(guān)代理商/技術(shù)參數(shù) |
參數(shù)描述 |
|---|---|
| M48TMH1TR | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:5V PC REAL TIME CLOCK |
| M48TPC1 | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:5V PC REAL TIME CLOCK |
| M48TPC1TR | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:5V PC REAL TIME CLOCK |
| M4-8TP-RJ45 | 制造商:Hirschmann Electronics GmbH & Co Kg 功能描述:Media Module, MACH 4000, 8xRJ45 (10/100 Meg) + 8xRJ45 (10 Meg) Copper Ports |
| M48TV-70MH1 | 制造商:STMICROELECTRONICS 制造商全稱:STMicroelectronics 功能描述:3.3V-5V TIMEKEEPER CONTROLLER |
發(fā)布緊急采購,3分鐘左右您將得到回復(fù)。